Team Han Solo
Contents
Prolog
If you want a job done right, do it yourself!
Abstract
Im Rahmen der Blockwoche Medizintechnik DIY entwickelten sich die Studierenden in den Disziplinen Selbstständig und Durchhaltevermögen weiter. Sie wurden angesponnen Projekte zu verfolgen, welche ihnen Spass bereiten und im Rahmen von Medizintechnik und "Do it yourself" liegen. In der Blockwoche wurden diverse Bauteile und Materialien von den Dozenten zur Verfügung gestellt. Mit den verfügbaren Materialien konnten die Studierenden eine oder mehrere Projekte realisieren. Zusätzlich stand ein programmierbares Board, das Arduino, zur Verfügung. Mit dem Arduino kann mit wenig Programmiervorkenntnisse kleinere Projekte realisiert werden. Im Internet konnten weitere Informationen in Form von Forums gesammelt werden.
Für die Projekte mit dem Arduino wurde zusätzlich das Modul «Mucle Spiker Shield» bestückt und gelötet. Mit dem Arduino konnte dann das Modul getestet werden. Das Programm konnte von den Herstellern des «Muscle Spiker Shield» (Backyard Brains) verwendet werden. Weiter konnte in sogenannten «Skill Share Sessions» spezifische Fähigkeiten erlernt werden. Die «Skill Share Sessions» wurde von Studierenden oder Dozenten durchgeführt. Zuerst wurden alle erlernbaren Fähigkeiten, welche die Studierenden oder Dozenten anbieten konnten, gesammelt als Mindmap. In einem zweiten Schritt wurden diese von den Teilnehmern der Blockwoche bewertet und daraus wurden zwölf «Skill Share Sessions» bestimmt. Anschliessend konnten sich jede Gruppe in die "Skill Share Session" einschreiben, welche sie den anderen Studenten vortragen möchten. Weiter sollte sich jeder Student und jede Studentin für mindestens zwei "Skill Share Session" einschreiben, welche sie besuchen wollten.
In der Gruppe sind viele Projekte entstanden. Unter anderem wurde ein Windrad realisiert. Das Windrad wurde mit Hilfe eines 3D-Druckers gedruckt. Betrieben wird das Windrad mit einem Motor und Solarpannels. Die Grundüberlegung für den Windrad war die Versorgung mit grünen Energie für unsere Projekte. Eine weitere Überlegung für das Windrad ist das "Mindset" der Personen zu sensibilisieren, damit ein ökonomischer und gesünderer Lebensweg beschrittet wird. Dadurch wird bezweckt, dass die Anzahl der Medizingeräte auf dem Markt reduziert werden könnte. Weiter konnte in der Gruppe ein Greifer entwickelt werden. Der Greifer ist in der Lage durch Tastendruck Gegenstände zu greifen. Bei diesem Projekt verfolgten wir die Idee einer Prothese, welche die Hand ersetzen kann, falls diese nicht funktionsfähig ist. Das letzte grosse Projekt war ein Theremin, welches mithilfe eines Bausatzes aus dem Internet realisiert wurde. Mit dem Theremin können durch Handbewegungen verschiedene Töne generiert werden.
Am letzten Tag der Blockwoche wurden die Projekte und die jeweiligen Learnings den anderen Teilnehmern der Blockwoche vorgestellt. Während 15 min standen die Gruppen den anderen Teilnehmern zur Verfügung. Jede Gruppe hat zum Vortrag noch den Auftrag eine Wiki-Seite zu gestalten, die die ganze Woche beschriebt, die Projekte näher erklärt, und/ oder gewisse Themen zusammenfasst etc.
Die Gruppe hat in diese Woche viele neue und interessante Thematiken behandelt und können vieles mitnehmen aus dem Kurs. Durch die verschiedenen Experimente und Projekte konnte mit vielen Materialien gearbeitet werden. Die Studierenden entwickelten ein Händchen für die jeweiligen Materialien. Die Gruppe ist einstimmig, dass sie die Blockwoche ein zweites Mal belegen würden.
Einleitung
In der Blockwoche Medizintechnik DIY, welches im Frühlingssemester 2019 durchgeführt wurde, befassen sich die Studierenden mit dem Ansatz „Do it yourself!“. Die Gruppe Han Solo besteht aus vier Gruppenmitgliedern aus den Bereichen Medizintechnik, Maschinentechnik sowie Wirtschaftsingenieurwesen. Für das Modul soll bis ende Woche ein oder mehrere Projekt realisiert werden. Das Projekt darf von den Studierenden selbst definiert werden. Das Projekt soll basierend auf elektrophysiologischen Messmodulen (EMG, EKG, EOG, EEG) entwickelt werden. Erste Prototypen werden mit den Mitteln der Digitalen Fabrikation (3D-Drucker, Lasercutter) hergestellt und getestet. Die notwendigen grundlegenden Informationen sollen selbstständig von den Studierenden recherchiert und erarbeitet werden, damit diese ende Woche ein lauffähiges Projekt haben, damit dieses den anderen Studierenden der Blockwoche präsentiert werden kann. Das Modul verbindet Anwendungen der Medizintechnik mit Do It Yourself-Ansätzen. Dadurch wird das tiefere Verständnis von medizintechnischen Geräten durch einen direkten, interdisziplinären und möglichst selbstgesteuerten Zugang gefördert.
Teammitglieder

Mahareesan Kunabalasingam Medizintechnik

Régis Andreoli Wirtschafts- ingenieurwesen

Curdin Casanova Maschinen- technik

Kevin Frey Maschinen- technik




Curdin Casanova
Curdin ist gelernter Automatiker und studiert im 7. Semester berufsbegleitend Maschinentechnik an der Hochschule Luzern. Nebenbei arbeitet er mit einem 60% Arbeitspensum bei der Firma V-Zug AG.
Kevin Frey
Absolvierte eine Lehre als Polymechaniker und arbeitete danach mehrere Jahre in der Andritz Hydro AG in der Grossbearbeitung. Im Jahr 2015 startete er das berufsbegleitend Maschinenbaustudium und ist seit dem Sommer 2018 in einem Engineering Team der Andritz Hydro AG.
Regis Andreoli
In Basel aufgewachsen absolvierte Régis seine Erstausbildung an der Wirtschaftsmittelschule Reinach (BL). Nach einem einjährigen Praktikum in der Sensorikbranche studiert er nun im 5. Semester Wirtschaftsingenieurwesen in Mechanical & Computer Engineering.
Mahareesan Kunabalasingam
Mahareesan Kunabalasingam ist gelernter Elektroniker. Er studiert zurzeit an der Fachhochschule in Luzern (HSLU) Medizintechnik im 4.Semester.
Basics
In den folgenden Abschnitten werden Grundlagen, welche im Kurs erarbeitet wurden, dokumentiert. Ziel dieses Abschnittes ist es, dass zukünftige Teilnehmer dieses Kurses folgende Abschnitte lesen können, um schnell einen Einblick in die Thematik zu erhalten und eine Grundlage für die Thematik haben.
Löten
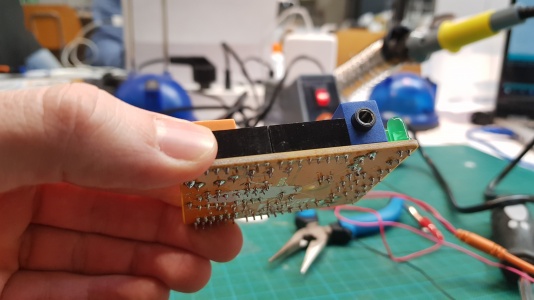
Löten ist ein Verfahren zum Verbinden metallischer Werkstoffe mithilfe eines Lotes. Der Schmelzpunkt des Lotes liegt tiefer als die Schmelzpunkte der Grundwerkstoffe. Die Grundwerkstoffe werden beim Löten benetzt, aber nicht angeschmolzen. Im Modul wird das Weichlöten verwendet. Das dafür verwendete Material, welches die beiden Materialen verbindet ist Zinn. Zinn hat eine Schmelztemperatur von ungefähr 320-335°C. Beim Löten von Bauteilen werden zwischen THT und SMD Bauteilen unterschieden. SMD (Surface-mounted device) sind Bauteile welche an der Oberfläche von der Leiterplatte gelötet wird und THT (through-hole technology) werden durch die Leiterplatte hindurchgesteckt, damit diese dann auf der Rückseite der Platine gelötet werden können.

SMD

THT


Beim Löten sollten die Polarisation der Bauteile beachtet werden, damit diese auch korrekt in Betrieb genommen werden können. Zum Beispiel Leuchtdioden, zum Teil auch Kondensatoren (Elektrolytkondensatoren), Dioden und Mikrocontroller sind polarisiert. Bauteile wie Widerstände, Keramikkondensatoren und Spulen haben keine Polarisation.
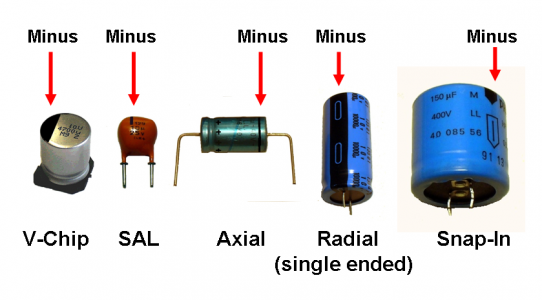
Polarität von Kondensatoren
Leuchtdioden
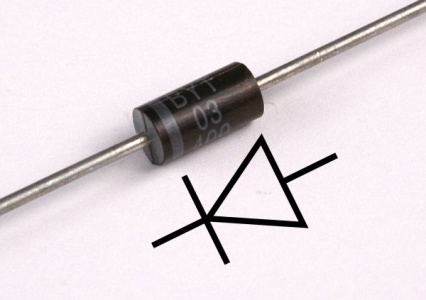
Dioden



Beim Löten wird zuerst eine geringe Menge an Zinn auf die Lötspitze angebracht, um den Wärmekontakt zu begünstigen. Weiter wird mehr Lötzinn unter einem Benetzungswinkels hinzugefügt. Zum Schluss wird der Lötdraht zurückgezogen.
Weiter Informationen zum Löten sind in diesem Dokument festgehalten: File:Löten.pdf
Es ist wichtig, dass jede Lötstelle kontrolliert wird, denn eine einzige schlechte Lötstelle kann das Funktionieren eines ganzen Systems infrage stellen.
Arduino
Arduino ist ein Physical-Computing-Plattform. In der Blockwoche werden alle Experimente hauptsächlich mit diesem Modul realisiert. Dafür stehen verschiedene Plattformen als Hilfestellung zur Verfügung. Beispielcodes, Zusammensetzungen der Bauteile oder auch Inspirationen für Projekte sind im Internet zu finden. Eine sehr nützliche Webseite ist www.arduino.cc. Arduino hat diverse Pins, welche der Programmierer als Eingang bzw. als Ausgang definieren kann. Als Ausgang wird in der Programmierumgebung IDE ein Pin folgendermassen definiert: pinMode(12,OUTPUT); Der Pin 12 wird als Ausgang definiert. Möchte man einen Eingang definieren, wird das folgendermassen definiert: pinMode(4,INPUT); Der Pin 4 wird als Eingang deklariert und es kann beispielsweise ein Taster angeschlossen werden.
Weitere Eingänge wie zum Beispiel Sensoren können an das Board angeschlossen werden. Aus den Sensoren können Daten generiert werden, welche für weitere Befehle an die Ausgänge verwendet werden können. So kann Beispielweise von einem Temperatursensor die Temperatur gemessen werden mit dem Befehl analaôgRead(). Sobald die Temperatur ein vorbestimmtes Temperaturschwellenwert überschritten hat, kann mit Hilfe von einer Leuchtdiode eine Warnung ausgegeben werden.
Mit der Programmierumgebung von Arduino, IDE Software, können Programme geschrieben werden und diese auf dem Mikrocontroller geladen werden. Die Programmierumgebung bietet einige Beipspielcodes für gewisse Module. Codes für Servomotoren, Display, Schnittstellen etc. sind im Untermenü Datei/File -> Beispiele/Examples erhältlich.
Arduino ist preiswert und bietet für Anfänger eine einfache Programmierumgebung. Durch die vielen Beispiele im Internet bereitet das Programmieren mit dem Arduino auch viel Freude!
CAD
CAD ist die Abkürzung für „computer-aided design“ zu Deutsch rechnerunterstütztes Konstruieren. Mit Hilfe solcher Programme lassen sich virtuelle 3D-Modelle aufmodellieren. Die erzeugten CAD-Modelle können in Simulations- und Berechnungsprogrammen weiterverwendet werden. Volumenkörper oder 2D-Ansichten können exportiert werden, welches für die additive Fertigung (3D-Drucker) oder das Lasercutting von grossem Vorteil ist.
Es empfiehlt sich das „NX-12“ oder das „SolidWorks“ im Software Kiosk der HSLU Herunterzuladen.
Arbeitsjournal
Tag 1
Am ersten Tag gab es zu Beginn von den Dozierenden Urs und Marc einen administrativen Block im FabLab, indem die notwendigen Anforderungen an die Studierenden mitgeteilt wurden. Im Anschluss wurden Gruppen gebildet, welche bis zum Mittag Zeit erhielten ihren Arbeitsplatz einzurichten. Sobald der Arbeitsplatz eingerichtet war, konnte mit dem ersten Auftrag begonnen werden. Die Gruppe sollte das Modul "Muscle Spiker Shield" bestücken und löten. Kurz vor Feierabend gab es von Marc noch eine kurze Einführung. Thema der Einführung war die Gestaltung der Wiki-Seite, welche die Studierenden drei Wochen nach der Blockwoche abgeben müssen. Dazu wurden einige Befehle in der Wiki-Umgebung näher erläutert.
Resultate: Nach der Anleitung von Backyard Brains konnte das Modul bestückt und in Betrieb genommen werden.

Erkenntnisse: Beim Löten ist ein Fehler passiert. Die Kontaktstellen für das Modul Arduino
wurden bei der weiblichen Steckerleisten beim "Muscle Striker Shield" mit einer Seitenschneider ausversehen mit einem Seitenschneider weggeschnitten. Die Warnung in der Anleitung wurde zu spät bemerkt.
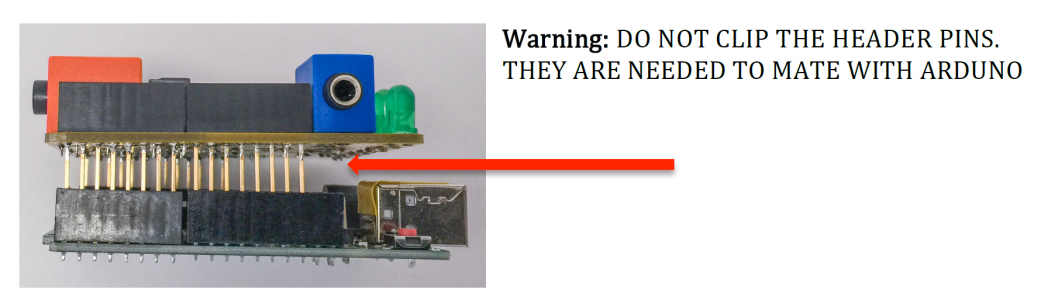
Anleitung
Fehlende Pins


Tag 2
Am zweiten Tag der Blockwoche begann der Unterricht mit der Einführung in die "Skill Share Session". Dabei soll jede Gruppe eine Fähigkeit, welche die Gruppe oder ein Mitglied der Gruppe besitzt, mit den anderen Mitstudierenden geteilt werden. Diese Fähigkeit sollte einen Bezug auf die Blockwoche haben. Für die "Skill Share Session" haben die Studierende Fähigkeiten aufgeschrieben, welche sie mit den anderen teilen möchten, aber auch Fähigkeiten aufgeschrieben, welche sie von den anderen Studieren erlernen möchten. Am Nachmittag wurden dann zwölf "Skill Share Sessions" bestummen. Darunter "Fisch entnehmen, Baisic Begriffe in Rätoromanisch, Löten etc." Im weiteren Verlauf des Tages arbeitete die Gruppe Han Solo an individuellen Aufgaben. Zum einen wurden mit Hilfe eines 3D-Druckers einige Formen gedruckt. Ein weiterer Mitglied beschäftigte sich mit dem Lasercutter und eine Aufgabe bestand darin verschiedene Experimente mit dem "Muscle Spiker Shield" durchzuführen.
Am Abend gab es noch ein Konzert von Daniel und Emma, welche von Fribourg anreisten. Das Konzert wurde mit einem Apéro abgerundet.
Resultate: Mit dem "Muscle Spiker Shield" konnten die Intensität der Aktionspotenzials, welches am Unterarm abgefangen wurde, mit Hilfe der Leuchtdioden angezeigt werden.
Desweiteren konnte ein Lautsprecher an die blaue Buchse vom "Muscle Spiker Shield" angeschlossen werden, um das Aktionspotenzial auch akustisch wahrzunehemen. Ein weiterer Versuch bestand darin mit dem Mittelwert der Intensität, welche generiert wurde, einen Servo-Motor anzusteuern. Dieser Versuch gelang bedauerliche Weise nicht. Trotz verschiedenen Lösungsansätzen gelang der erwünschte Effekt nicht. Die Gruppe versuchte mit dem Arduino einen Temperatursensor auszulesen. Die Idee war ein System zu entwickeln, dass den Träger des Systems bei steigender Temperatur oder bei einer erhöhten Körperaktivität kühle Windstösse abgibt. Die Windstösse sollen mit einem Ventilator ermöglicht werden.
Vom FabLab-Manager wurde eine kurze Einführung gehalten zum Thema "Bearbeitung mit dem Lasercutter und 3D-Drucker". Mit der Einführung konnten 3D-Objekte gedruckt oder Materialen ausgeschnitten werden.

Um die Möglichkeiten des Lasercutters kennenzulernen wird eine Gravur des legendären Yoda aus der Star Wars trippel Trilogie gelasert und diese in ovaler Form ausgeschnitten.
Das Bearbeitungsprogramm des Lasercutters ist RDWorksV8, in dem der Oval für den Schnitt erstellt wird. Die Yoda-Abbildung ist eine Vektorgrafik aus dem Internet. Diese kann problemlos in RDWorksV8 integriert und skaliert werden.
Das Material ist 3mm MDF (Mitteldichte Holzfaserplatte). Die länge beträgt etwa 200mm.
Erkenntnisse: Der Servo-Motor benötigt viel Strom, welche eine zusätzliche Speisung benötigt. Da kein Spannungsregler vorhanden war, konnte der Versuch mit der Steuerung des Servo-Motors mithilfe der Intensität nicht getestet werden. Mit einer externen Speisung und einem Spannungsregler könnte der Versuch erfolgreich getestet werden.
Tag 3
Am dritten Tag der Blockwoche gab es die vorbereiteten Skill Share Sessions von den Studierenden und den Dozierenden. Die Gruppe hat unter anderem an der Skill Share Session "Fische entnehmen" und "Rätoromanisch" teilgenommen. Die gewonnen neuen Erkenntnisse und Ablauf des Skill Share Sessions sind im Kapitel Skill Share Session festgehalten. Weiter wurden an den jeweiligen Projekten weitergearbeitet. Es wurden weitere 3D-Objekte auf dem 3D-Druker gedruckt. Die Wiki-Seite wurde aktualisiert und weiter wurden verschiedene Experimente mit dem Arduino durchgeführt. Kurz vor Mittag besprachen die Teilnehmer der Blockwoche mit den Dozierenden ihre Eindrücke von der Blockwoche. Antriebe, Ziele, Probleme wurden miteinander besprochen. Am Nachmittag gab es ein Input von Effi Tanner. Sie erzählte von ihren Erfahrungen mit dem Arduino. Weiter wurde ihr Werdegang näher erläutert. Nach dem Input widmete sich die Gruppe wieder ihren Projekten. Dabei sind interessante kleinere Projekte entstanden.
Tag 4
Am vierten Tag der Blockwoche wurden weitere Experimente durchgeführt. Es wurde ein Theremin do it yourself Bauset zusammengesetzt. Es wurde versucht "Alle meine Entchen" auf dem Theremin zu spielen. Ausserdem wurde mit dem Arduino ein Servo-Motor angesteuert. Im Anschluss wurde versucht durch Muskelkontraktion den Servo-Motor zu steuern. Die Überlegung war eine Prothese, welche Gegenstände greifen kann. Leider konnte dieses Experiment nicht erfolgreich getestet werden, da die Steuerung vom "Muscle Spiker Shield" und dem Greifer nicht miteinander harmonierten. Ein weiteres Projekt war die Realisierung eines Windrads. Dazu wurde mithilfe vom 3D-Drucker ein Windrad gedruckt und mit wenig Elektronik sollte das Rad zum drehen gebracht werden. Das Windrad kann unter anderem mit Sonnenenergie betrieben werden. Ansonsten wird diese mit einem 9V-Batterie betrieben. Am Nachmittag hatten wir noch eine Skype Kommunikation mit dem CEO, Greg Gage, von Backyard Brains. Wir konnten ihm einige unserer Experimente zeigen und ermöglichte uns einen Einblick in sein Alltagsleben.
Resultat:


Erkenntnisse: Mit der fehlenden Spannungsregler könnte der Greifer gemeinsam mit dem "Muscle Spiker Shield"in Betrieb genommen werden.
Tag 5
Am fünften Tag der Blockwoche hat die Gruppe weiter an ihren Projekten gearbeitet. Dabei wurde das Ziel einer Prothese realisiert. Der unterschied zum Tag 4 ist, dass nun nur mit dem Arduino gearbeitet wird und nicht noch zusätzlich mit dem "Muscle Spiker Shield". Die Steuerung des Greifer erfolgt nur über einen Taster. Für die Prothese wurde der Greifer mithilfe eines Lasercutters und ein zweiter Greifer mit dem 3D-Drucker gefertigt. Die Schaltung besteht zu einem aus dem Motor und dieser wird per Tastendruck gesteuert. Weiter wurde das Windrad lackiert und für die Präsentation schön präpariert.
Resultate: Es konnte eine Prothese realisiert werden. Dabei wurden zwei Greifer angefertigt.
Erkenntnisse: Der Greifer, welcher mit dem Lasercutter gefertigt wurde eignet sich vom Material her besser als der Greifer, welcher mit dem 3D-Drucker gefertigt wurde.
Bei der Realisierung des Greifers ist die Gruppe auf ein Widerstand gestossen. Es stellte sich raus, dass der Taster auch falls er ungedrückt war zum Teil ein High-Signal an den Mikrocontroller sendete. Bei der Suche des Fehlers konnte mit einem Oszillator grafisch dargestellt werden, dass der Schalter "prellt". Das heisst der Taster sendet nach dem Loslassen oder beim Drücken des Tasters unregelmässig High und Low Signale. In der unten abgebildeten Grafik ist das Prellen des Taster abgebildet.

Der Taster muss daher entprellt werden. Dazu die Gruppe zwei Methoden im Internet herausgefunden. Zu einem kann ein 10kOhm Widerstand an den Taster angeschlossen (Pull-up oder Pull-Down) werden oder im Programm kann ein "delay" verwendet werden. Beim Pull-up Widerstand wird der Taster logisch auf High gesetzt und bei einem Pull-Down Widerstand logisch auf low gesetzt.
Tag 6

Am letzten Tag der Blockwoche präsentierte jede Gruppe innerhalb von 15 min ihre Projekte und was sie in dieser Woche gelernt haben. Am Schluss des Tages gab es eine Reflexion über die gesamte Woche und schliesslich gab es den offiziellen Abschluss von Seiten der Dozenten. Wir möchten uns hier noch bei den Dozenten ganz herzlich bedanken, dass sie sich die Zeit genommen haben, uns den Ansatz des "Do it yourself" mit Energie und Engagement zu vermitteln. Vielen Dank Urs, Marc,Effi und Chris!
Experimente
Muscle Spiker Shield DIY
Jede Gruppe erhielt von den Dozierenden ein "Muscle Spiker Shield". Dieses Modul sollte als Gruppe zusammengebaut werden. Die Aufgabe bestand darin das Gerät zu bestücken und zu löten. Mit dem "Muscle Spiker Shield" konnten dann verschiedene Experimente durchgeführt werden. Eines dieser Experimente war die Messung und Darstellung der Intensität des Unterarmmuskels, welche mit Hilfe der Leuchtdioden angezeigt werden. Die Intensität konnte dann in der Arduino-Umgebung IDE als Kurve dargestellt werden. Auf der x-Achse wird die Zeit dargestellt und auf der y-Achse wird die Intensität angezeigt. Das Maximum der Intensität kann im Programm verstellt werden. In unserem Beispiel ist das Maximum 120. (#define MAX 120)


Programm:File:Intensität der Leuchtdioden.pdf Im weiteren Verlauf der Experimente wurde mit einem Lautsprecher versucht die Intensität akustisch wahrzunehmen. Dafür wurde der Lautsprecher an die blaue Buchse vom "Muscle Spiker Shield" angeschlossen. Ein Rauschen ist mit einem Lautsprecher gut hörbar. (Mit dem Kopfhörer kann kein Rauschen wahrgenommen werden, da der Lautstärkenpegel zu klein ist.)
Human-Human-Interface
Das Human-Human-Interface ist eine von amerikanischen Studenten entwickeltes Modul. Es ermöglicht die Steuerung von der Hand von Versuchspersonen. Bei diesem Versuch wird das Signal von einer Person, welches vom Gehirn an dem Arm übertragen wird, abgefangen. Das abgefangene Signal wird dann an eine Person übertragen. Es ermöglicht die Steuerung vom Arm einer anderen Versuchsperson. Diese Steuerung wird als Zucken wahrgenommen.
Zum Versuchsaufbau: Bei der Formung einer geballten Faust spannt sich der Unterarmmuskel an. An diesem Muskel werden zwei Elektroden am Arm der steuernden Person befestigt. Diese Elektroden sollten möglichst nahe einander liegen. Eine weitere Elektrode wird auf der Handoberfläche angebracht.
Zwei weitere Elektroden werden auf dem Arm der gesteuerten Person angebracht. Die Elektroden werden dort angebracht, wo der Nerv entlangführt.

Anbringen der Elektroden an die steuernde Person

Anbringen der Elektroden an die gesteuerte Person


Funktion: Das Signal, welches bei der Kontraktion der Unterarmmuskulatur entsteht, wird abgefangen und über den Mikrocontroller weitergeleitet. Die Stärke des Signals wird auf der LED- Anzeige auf dem Print dargestellt. Das Signal wird direkt an die Muskeln der gesteuerten Person weitergeleitet. Da die Signalübertragung vom Hirn über die Nervenbahnen zum Muskel umgangen wird, kann die gesteuerte Person nichts gegen die Bewegung ihres Armes tun. So kann eine Person durch Bewegen ihres Armes den Arm einer anderen Person mitbewegen. Diese Bewegung wird von den beteiligten als «zucken» wahrgenommen.
Temperatursensor
Ein weiterer Versuch war es mit einem Temperatursensor die Temperatur zu messen. Die Idee, welche die Gruppe verfolgte wurde im Kapitel "Arbeitsjournal: Tag 2" erläutert. Es geht um ein System, welches den Träger mit frischen Windstössen abkühlt, falls die Umgebungstemperatur steigt oder seine Körperaktivität zunimmt. Für diesen Zweck wurde im ersten Schritt versucht die Umgebungstemperatur zu ermitteln. Die ermittelten Daten konnten im Arduino-Programm als Monitor angezeigt werden. In weiteren Experimenten sollen nun die Zusammenarbeit zwischen Temperatursensor und Muskelintensität erarbeitet werden. Dieses Projekt wurde nicht mehr weiterverfolgt, da die Gruppe einstimmig entschieden hat eine Prothese zu entwickeln.


Programm:File:Temperatursensor.pdf
Blinken
Mit dem Arduino wurde versucht einfache Aufgaben zu erledigen, damit später grössere Projekte realisiert werden konnte. Zu Beginn wurde mithilfe vom world wide web versucht zwei Leuchtdioden zum Blinken zu bringen. An den Pins 12 und 13 werden Leuchtdioden angeschlossen. Die Schaltung ist in der nebenstehenden Grafik abgebildet. Es wurden 100Ohm-Widerstände verwendet.


Programm: File:Blinken.pdf
Taster als Input

Das vorherige Programm soll jetzt nun modifiziert werden. Eine Leuchtdiode blinkt und per Tastendruck soll nun die Leuchtdiode solange leuchten bis der Taster wieder losgelassen wird. Die Experimentier-Board wird wie in der nebenstehenden Abbildung beschalten. Für den Taster wurde laut der Anleitung ein 10kOhm-Widerstand verwendet.
Programm:File:Blinken mit Taster.pdf (VIDEO)
Servo Motor
In einem nächsten Schritt wurde versucht ein Servo-Motor anzusteuern. Ziel ist es eine Prothese zu entwickeln. Eine Prothese, welche Gegenstände greifen kann. dafür wurde zu aller erst einmal versucht die Position des Servo-Motors zu wechseln. Die oragne Verbindung des Servo-Motors wurde an Pin 9 angeschlossen. Die braune Verbindung wird mit Ground und die gelbe Verbindung mit der 5V-Speisung verbunden . Das Programm ist unten angehängt. Es es wichtig zu wissen, dass Servo-Motoren an einem Pin angeschlossen werden müssen, wo eine Pulse-width modulation möglich ist. Im Programm ist eine Header-Datei Servo.h eingebunden und diese steuert den Servo-Motor mit PWM an.
Programm: File:Servo Motor.pdf
Greifer Prothese

Auf der Webseite von Backyard Brains gibt es ein Experiment mit einem Greifer. Das Programm wurde von der Webseite downloaded. Die Beschaltung des Servo-Motor ist folgendermassen: rote Verbindung an 5V-Speisung; braune Verbindung an Ground; orange Verbindung an Pin 2. Das Programm ermöglicht die Steuerung eines Greifes mittels Muskelkontraktionen. Das Progamm wurde dann abgeändert, sodass eine Ansteuerung per Tastendruck möglich ist.
Wichtig: Der Muscle Spiker Shield muss zusätzlich noch durch eine 9V-Batterie gespiesen werden.
Programm: File:Servo Motor mit Muscle Spiker.pdf
Additiv Hergestelltes Nautilus-Getriebe
Um den 3D-Drucker besser kennenzulernen, wurde nach einem interessanten Mechanismus gesucht, der mit konventionellen Herstellungsmethoden nicht oder nur sehr schwierig herstellbar ist. Das „Nautilus-Getriebe“, bestehend aus zwei Zahnrädern die nicht rund, sondern in Form einer Fibonacci Spirale sind, erfüllte die gewünschte Komplexität.
Damit die komplizierte Form nicht selber konstruiert werden muss, stand ein 3D-File auf https://grabcad.com/library/nautilus-gear-2 zur Verfügung.
Um die Zahnräder ohne Stützmaterial zu drucken, wurden die Files auf dem Konstruktionsprogramm NX12, welches gratis für Studierende der Hochschule Luzern zur Verfügung steht, optimiert. Dabei wurde geachtet, dass kein „überhängendes“ Material, sprich keine Steigung im Raum grösser als 45° beträgt.
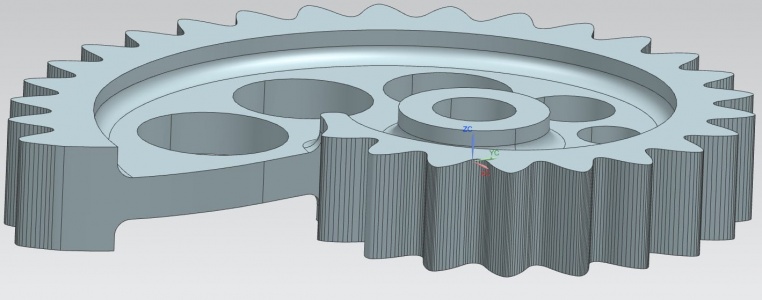
Zahnrad
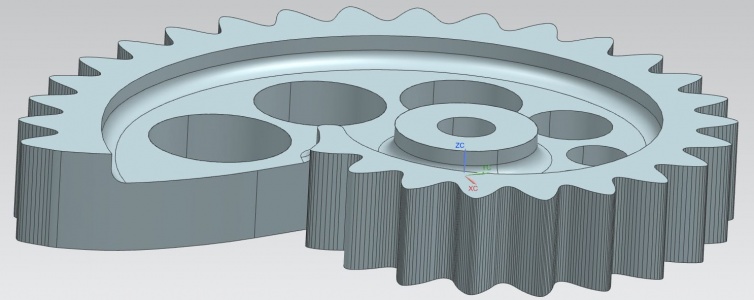
optimiertes Zahnrad


Beim 3D Druck Programm „Ultimaker Cura“ wurde bei den Einstellungen die Bohrung der Zahnräder mit 0.5mm Zugabe versehen. Diese Materialzugabe ist nötig, um nach dem Druckvorgang mit einer Reibahle die Bohrung auf einen präzisen und formgenauen Durchmesser aufzubohren. Dazu eignet sich die Ständerbohrmaschine und das Werkzeug von der Elektrotechnik Werkstatt von der HSLU ausgezeichnet.
Sind alle Optimierungen und Zugaben definiert, stehen im Fablab zwei verschieden 3D Drucker zur Verfügung. Der Eine besitzt eine 0.4mm, der Andere eine 0.8mm breite Düse. Der Erstgenannte ist durch die feinere Düse genauer in der Fertigung, braucht jedoch mehr Zeit. Da beim „Nautilus-Getriebe“ die Qualität Vorrang hat, fiel der Entscheid auf jenen Drucker mit der feineren Düse.

Fazit:
Die Qualität der additiv gefertigten Teile konnte voll und ganz überzeugen. Der Druckprozess muss nicht überwacht werden und der Vorbereitungsaufwand liegt bei einigen wenigen Minuten. Das einzige benötigte Wissen, ist das Beherrschen eines 3D-CAD Programmes, um die komplizierten Geometrien zu konstruieren oder abzuändern.
Bei weiteren 3D-Druckversuchen überzeugte auch die „Ultimaker Cura“ Software. Diese ist intuitiv in der Bedienung. Ausgestattet mit einem ausgeklügeltem Algorithmus entscheidet die Software selbst wo Stützmaterial benötigt wird.
Multi Casette Adaptor
Mit einem ”Multiple Casette Adaptor” kann ein portabler Player auf unkomplizierter Weise an einem Autoradio mit Kassettenschacht angeschlossen werden. Einer dieser Adapter stand zur Verfügung, funktionierte jedoch nicht mehr. So wurde ein Adapter auseinandergenommen und analysiert. Mit einem Multimeter wurde die Verkabelung auf mögliche Wackelkontakte untersucht und dabei stellte man fest, dass das verbaute AUX-Kabel einen Unterbruch aufwies. Dieses Kabel wurde daraufhin ersetzt wobei die erlernten Löt-Kenntnisse an einem praktischen Beispiel angewendet werden konnten.


Projekte
Theremin
Geschichte
Das Theremin ist ein elektronisches Musikinstrument welches berührungslos gespielt wird. Es wurde 1920 vom russischen Physikprofessor Lew Sergejewitsch Termen (später Leon Teremin) erfunden. Das Termin polarisierte zu seiner Zeit sehr, da es sich stark von herkömmlichen Instrumenten unterschied. Bislang kannte man nur elektronische Instrumente, welche über eine Klaviatur bedient wurden. Im Gegensatz dazu wird das Theremin auf wundersame Art und Weise berührungslos gespielt.

Lew Sergejewitsch Termen beim Spielen des Theremins Bild: Imago; Copyright: Imago/United Archives International
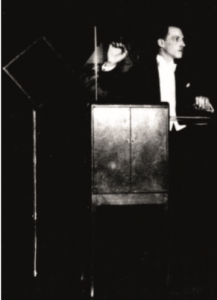
Lew Termen beim Spielen des nach ihm benannten Instruments Bild: Wikimedia; Quelle: Griffiths, Paul (1978). A Concise History of Modern


Funktionsprinzip
Das Theremin besitzt zwei Antennen, wobei eine senkrecht in die Höhe und die zweite waagrecht platziert sind. Dabei kann der Spieler mit der senkrechten Antenne die Tonhöhe variieren und gleichzeitig mit der waagrechten die Lautstärke regulieren. Somit können verschiedenen Melodien und Rhythmen generiert werden, welche aus einem Lautsprecher im Theremin wiedergeben werden.
Über die Antenne wird durch den Oszillator ein elektrisches Feld erzeugt. Beweget sich nun die Hand des Spielers Richtung Antenne beeinflusst dies das elektrische Feld und somit den Schwingkreis des Oszillators.
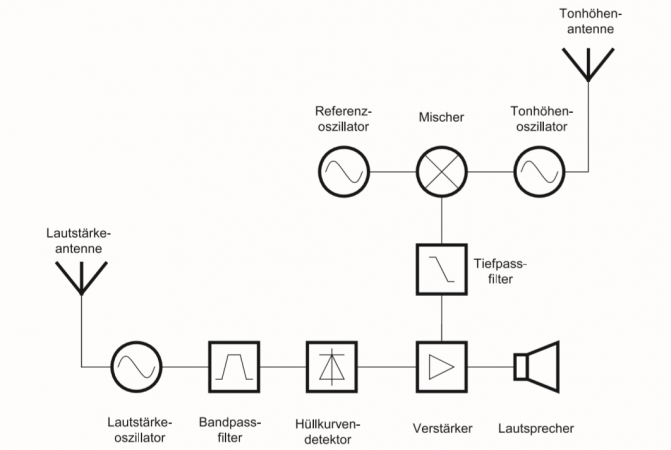
Blockschaltbild eines Zwei-Antennen-Theremins. Bild: Das Franzis Bauset - Theremin selber bauen

Schema
Im Internet können Bausätze mit allen benötigten Komponenten einfach bestellt werden. Dies erleichtert den Bau des Instruments immens. Nachfolgend sind die benötigten Bauteile sowie der elektrische Schaltplan dargestellt.


Aufbau und Montage
Beim Zusammensetzen der verschiedenen Bauteile konnten die erworbenen Löt-Kenntnisse an einem praktischen Beispiel angewendet werden. Dabei war zu beachten, dass eine sinnvolle Reihenfolge beim verlöten der Bauteile eingehalten wurde, damit der Zugang zum Lötkontakt nicht erschwert wurde. Zudem musste das Gerät beim Anbringen der Antenne bereits im Gehäuse verbaut werden.


Windrad
Mit ihrer unverkennbare Silouhette nimmt das Windrad eine wichtige Rolle in der Szene der eneruerbaren Energien ein. Folgend ein Projekt über die kreation eines Windradminiaturs für die innenraum Dekoration.
Die Grundform des Windrades besteht aus vier Einzelteilen; Rotorblätter, Gondel, Turm 1, Turm 2. Diese werden mit einem 3D-Drucker mit einer 0.8mm Düse gedruckt. Das Windrad wird nach dem Druck auf Druckfehler überprüft und nachgebessert. Für eine bessere visuelle Präsentation werden die Teile mit einem weissen Kunstharz lackiert.
.jpeg)
Das Windradminiatur sollte sich, wie ein richtiges Windrad, drehen können, um als innenraum Designobjekt den Raum zu animieren. Dafür muss einen DC-Motor eingebaut werden. Dieser darf nicht grösser als 10mm x 9mm x30mm (BxHxL) sein. Im Fablab liegen zur Verfügung kleine Pumpen herum, die ihrer Grösse nach ein kleiner Motor beinhalten müssen. Die Pumpe wird auseinandergeschraubt und der Motor ausgebaut.

Als reduntante Anregung für die Thematik der Nachhaltigkeit wird der Motor, der das Windrad rotieren lässt, mit Photovoltaik gespiesen. Das Solarpannel mit den Dimensionen 120mm x 190mm wird vorbereitet und die Leistung mit einem Voltmeter ermittelt. Rechtwinklig zur Sonne erreicht es Werte um die 20 Volt mit einer Stromstärke von 5 Milliampere.
.jpeg)
Diese Leistung von 0.1 Watt ist genügend um den kleinen DC-Motor anzutreiben. Der Motor lauft solange das Solarpannel eine Neigung von etwa 45 Grad oder mehr zur Sonne hat. Im Innenraum ist die Strahlung ungenügend intensiv um den kleinen Motor anzutreiben.

Es wird ein Loch in den Rotorblätter gebohrt und anschliessend werden diese mit Sekundenkleber am DC-Motor angeklebt.

Der Motor wird in der Gondel mit Heissleim geklebt und verbindet so die Rotorblätter mit der Gondel. Die zwei Motorkabeln werden im innraum des Windradturmes durchgezogen.

Das fertige Model steht auf einer Holzunterlage. Um das Windrad auch ohne Solarpanel betreiben zu können, wird eine Schaltung für eine Batterie montiert.

Greifprothese
Herstellung der Greifprothese
Professionelle Handprothesen sind heutzutage sehr teuer und gerade Menschen in ärmeren Ländern können sich deren Anschaffung kaum leisten. Die Idee des Projekts besteht nun darin, dass aus einfachsten Mitteln und mit wenig finanziellen Ressourcen eine einfache Handprothese hergestellt werden kann. Diese Prothese soll den Menschen, welche Gliedmassen verloren haben, dazu dienen, das Greifen von Gegenständen wieder zu ermöglichen und somit den Alltag erheblich zu erleichtern.
Als Basis dient eine 3D-Baugruppe welche bei https://grabcad.com/library/robotic-gripper-and-end-effector-1 heruntergeladen werden kann. Diese wurde um den Faktor 2 vergrössert und zusätzlich die Grundplatte verlängert. Montiert wird die Greifprothese an einer Armschiene, wie sie im medizinischen Bereich oft zur Schonung des Handgelenkes verwendet wird.
Die Herstellung erfolgte zum grössten Teil auf dem Lasercutter vom Fablab. Als Material dienten 5mm dicke MDF Platten. Einzig das Zahnrad, welches auf dem Servomotor sitzt, ist das Produkt eines 3D-Druckers.
Der Servomotor wird von einem Arduino angesteuert der die Eingangssignale von einem Drucktaster erhält. Natürlich wäre auch eine Ansteuerung über das „Muscle Spiker Shield” Modul, welches bereits im Kapitel 5.2 beschrieben wurde, möglich.
Problem bei der Weiterverarbeitung von 3D-Druck Teilen:
Bei der Herstellung des Zahnrades war noch nicht klar, mit welchem Servomotor die Greifprothese angetrieben werden soll. Deshalb wurden auch keine Befestigungsbohrungen oder andere konstruktiven Massnahmen beim Druckprozess berücksichtigt.
Als der Servomotor Typ bekannt war, sollte das Zahnrad mit Hilfe von Holzschrauben an diesem befestigt werden. Es stellte sich jedoch heraus, dass Holzschrauben nicht ohne weiteres in das 3D gedruckte Zahnrad geschraubt werden können, da diese immer wieder abbrachen, bevor sie ganz angezogen werden konnten.

3D-Druck Zahnrad mit abgebrochener Holzschraube

Um dies zu verhindern wurden kleine Bohrungen in das Zahnrad gebohrt, damit die Schrauben mit geringerem Kraftaufwand anzuziehen sind. Aber auch dieses Vorhaben war leichter gesagt als getan. Denn beim Bohren der Löcher entstand mit den Metallbohrern so viel Wärme, dass der Thermoplast aus welchem das Zahnrad bestand anfing zu schmelzen. Beim Herausziehen des Bohrers aus der Bohrung blieb der flüssige Kunststoff im Loch und verschloss es wieder. Nach langem ausprobieren konnte mit Holzbohrern (schnittiger als Metallbohrer) und sehr kleinen Drehzahlen (Vc=2m/min) die Bohrungen gefertigt werden. </p> Weiter Tipps sind: Verwendung von Pressluft als Kühlung, spanbrechendes Bohren, Spanentleerung bei tiefen Löchern.
Video vom Greifer
Rätoromanisch
In der Skillshare - Session "Rätoromanisch" wurde auf die historische Entwicklung der 4. Landessprache der Schweiz eingegangen. Zudem wurde anhand von Beispielen die markanten Unterschiede zwischen den verschienden Idiomen verdeutlicht. Am Ende der Session konnten die Kursteilnehmer den Kursleiter Wörter und Sätze fragen, welche sie übersetzt haben wollten.
4. Landessprache Rätoromanisch (1963) | SRF Archiv [1]
Allgemeine Informationen
- ca. 60'000 sprechende Personen (Volkszählung 2000)
- 5 verschiedenen Idiome
- In der Verfassung verankert (4. Landessprache)
- Einheitsromanisch (Rumantsch Grischun)
- Auf Unesco Liste der bedrohten Sprachen
Fisch entnehmen
Zwei Teamkameraden der Gruppe Han Solo besuchten die Skill Share Session Fisch entnehmen. Ziel dieses Workshops ist zu lernen, wie die Organe eines Fisches entnommen werden, um diesen bis zur Verzehrbereitschaft zu verarbeiten.
- Die Fische kommen gekühlt aus dem Coop. Es sind Goldbrassen und können samt Organen für 35 CHF/kg telephonisch bestellt werden.


- Sind die Organe entnommen, kann der Fisch nach belieben weiter prepariert werden. Am Schluss muss er gewaschen werden.


- Mit Kartoffeln beigelegt und mit Pfeffer, Salz und Zitrone gewürzt ergibt der Goldbrasse ein delikates Menu für die Mittagsverpflegung.


Zusammenfassend kann der Fisch entnehmen Workshop als gelungene Abwechslung am Technikum gelobt werden. Voraussetzung für dieses Workshop ist eine stabile Verfassung gegenüber organische Tiertexturen sowie die Gelassenheit, für die kommenden paar Stunden nach Fisch u.o. /-Inereien zu duften.
Reflexion
In der Blockwoche Medizintechnik DIY haben wir als Gruppe viele interessante Thematiken behandelt. Das Feedback der Gruppe über die Blockwoche ist positiv.
Durch diese Vielfältigkeit haben wir einige kleinere Projekte realisiert. Wir haben unter anderem kleine Projekte mit dem Arduino entwickelt. Eine Grundlage für das Programmieren mit dem Arduino gelegt. Das Arbeiten mit dem 3D-Drucker hat der Gruppe sehr viel Freude bereitet, sodass jedes Mitglied einige 3D-Objekte mit nach Hause mitnehmen kann. Zudem haben wir auch hier die Grundlagen für das 3D-Drucken erlangt. Eine Datei drucken, sowie wechseln der Farbrolle konnten mit der Zusammenarbeit mit dem FAB-Manager Chris erlernt werden. Auch erhielten wir ein Einblick in die Fertigung eines Prototyps mit dem Lasercutter.
Zu Beginn war das Arbeiten ohne ein genaues Ziel zu haben sehr ungewohnt, jedoch ist diese Angst/ Befürchtung sehr schnell verschwunden, als kleine Erfolge erzielt wurden. Durch das freie Arbeiten konnten viele Projekte realisiert werden. Zum Beispiel ein Theremin, Greifer, Blinken von Leuchtdioden, 3D-Objekte etc.
Die Teilnehmer haben in dieser Woche mit sehr vielen Materialen gearbeitet, dabei wurden Materialen auch zu Experimentzwecken modifiziert. Die Teilnehmer konnten durch "Ausprobieren" vieles lernen, da sie gezwungen waren die nötige Informationen selbst im Internet zu recherchieren. Die Zusammenarbeit hat hervorragend funktioniert, jeder konnte dem anderen Tricks und Tipps geben und profitierten sehr von dem Wissen der Gruppe.
Auch die Skill Share Sessions waren eine willkommene Abwechslung. Bei den Skill Share Sessions konnte der Fokus auf eine neues Thema gelegt werden. Die Blockwoche selbst ist gut aufgebaut und ist strukturiert. Zum Vergleich zu anderen Blockwochen hat die Blockwoche Medizintechnik DIY sehr viel Abwechslung.
Was in der Gruppe nicht willkommen waren die Inputs, welche die Teilnehmer aus ihren «Tunnelblick» herausreisten. Ein idealer Lösungsvorschlag wäre, wenn die Inputs zu Beginn oder am Ende des Tages gesetzt werden. Weiter sollte zu Beginn der Blockwoche eine Einführung in das Programmieren mit dem Arduino durchgeführt werden, damit alle die gleiche Grundlage haben. Das Material sollte sich an einem Platz befinden. Zum Teil wurde lange nach Materialen oder Instrumenten wie Multimeter gesucht. Des weiteren ist es ratsam, dass
Im Grossen und Ganzen hat uns die Blockwoche begeistert und wir konnten viel neues Wissen mitnehmen! Die Woche ist so schnell vergangen. Wir würden, falls wir könnten, die Blockwoche ein zweites Mal besuchen. Nochmals Danke für diese Woche Urs, Marc, Effi!
Epilog
"It takes half of your life before you discover life is a do-it-yourself project, Napoleon Hill"

Zurück zu Medizintechnik DIY