Difference between revisions of "Team Giraffe"
(→Team) |
(→Freitag) |
||
| Line 109: | Line 109: | ||
=== Freitag === | === Freitag === | ||
Heute ist Endspurt angesagt!<br /> | Heute ist Endspurt angesagt!<br /> | ||
| − | Unser Gehäuse für die Wickelmaschine besteht aus vielen kleinen Teilen, die mit dem Lasercutter geschnitten und dann zusammengesetzt werden müssen. Die Erstellung des Modells ist recht zeitintensiv | + | Unser Gehäuse für die Wickelmaschine besteht aus vielen kleinen Teilen, die mit dem Lasercutter geschnitten und dann zusammengesetzt werden müssen. Die Erstellung des Modells ist recht zeitintensiv und kurz vor dem Lasern merken wir, dass wir eine falsche Dicke angenommen haben. Diese Anpassungen haben wir erst nach dem Mittag fertig.<br /> |
| − | Der Motor ist grundsätzlich ebenfalls funktionstüchtig, allerdings beginnt er erst zu drehen, wenn das Potentiometer etwa 90% aufgedreht ist. Auch ist es recht schwierig, eine angemessene Drehgeschwindigkeit einzustellen. Dieses Problem wollen wir lösen mit dem Einsetzen eines einfachen Widerstandes parallel zum Motor, der den Gesamtwiderstand etwas verringern soll und der Motor damit schneller genug Strom erhält. | + | Der Motor ist grundsätzlich ebenfalls funktionstüchtig, allerdings beginnt er erst zu drehen, wenn das Potentiometer etwa 90% aufgedreht ist. Auch ist es recht schwierig, eine angemessene Drehgeschwindigkeit einzustellen. Dieses Problem wollen wir lösen mit dem Einsetzen eines einfachen Widerstandes parallel zum Motor, der den Gesamtwiderstand etwas verringern soll und der Motor damit schneller genug Strom erhält.<br /> |
=== Samstag === | === Samstag === | ||
Revision as of 14:46, 16 February 2018


Contents
Allgemein
Herzlich willkommen auf der Seite des Teams G. Wir sind ein interdisziplinäres 3er-Team bestehend aus Adrian Burri, Yao-Pin Thi, zwei aus dem Departement Maschinentechnik und Tobias Baumgartner, aus dem Departement Medizintechnik. Niedergeschrieben werden die Ereignisse, Ergebnisse und Erkenntnisse des Teams Giraffe vom 12.02.2018 bis 17.02.2018. Diese Seite dient zukünftigen Durchführungen der Blockwoche Medtech DIY.
Team
Adrian Burri, Maschinentechnik
Yao-Pin Thi, Maschinentechnik
Wohnhaft in Bellach SO und pendle täglich vom schönen Solothurn nach Horw. Ich studiere vollzeit Maschinentechnik im 5. Semester. Vor dem Studium habe ich eine Ausbildung als Konstrukteur bei der Firma ETA SA absolviert. Da arbeitete ich in der Abteilung Entwicklung Stanzwerkzeug bevor ich den Militärdienst bei den Fliegertruppen antratt.
Tobias Baumgartner, Medizintechnik
Ich komme ursprünglich aus Bichwil im Kanton St. Gallen, bin aber für das Studium an der HSLU nach Emmenbrücke in eine WG gezogen. Ich studiere Medizintechnik vollzeit in Horw und beginne mein 4. Semester. Meine Ausbildung habe ich bei der Huber+Suhner AG begonnen, wo ich die Lehre zum Phyiklaboranten machte.
Projekte
Löten und Experimentieren mit dem Muscle Spiker Shield

Als erstes Projekt wurde allen Teams ein Set von Backyard Brains verteilt. Darin enthalten war die Printplatte für das MUSCLE SPIKER SHIELD, die noch gelötet werden musste. Aus dem Internet konnte eine detailierte Anleitung zur Herstellung des fertigen Prints heruntergeladen werden. Darin ersichtlich ist das Schaltschema und die Komponentenliste. Bei der Sortierung der Bauteile gab es einige Schwierigkeiten, da ein spezifischer elektrischer Widerstand fehlte und es dafür drei falschen Widerstände hatten. Das Löten selbst war für keine schwierige Aufgabe, da alle schon Erfahrung hatten. Nach ein, zwei Komponenten waren alle wieder eingewärmt und kamen zügig voran. Etwas Glück mussten wir beim Einlöten der LEDs in Anspruch nehmen: Beim ersten LED achteten wir nicht auf die Ausrichtung der Leuchtdiode. Glücklicherweise hatten wir sie korrekt eingebaut.

Nachdem wir die Printplatte erfolgreich bestückt hatten, befestigten wir zwei Elektroden an einem Unterarm. An diesem können wir die vom Arm eingehenden nervösen Erregungen messen. Eine weitere Elektrode auf dem Handrücken gebrauchten wir als Referenz. Das Muscle Spiker Shield wird auf ein Arduino UNO angebracht, welches den Print mit Strom versorgt und eine Kommunikation mit einem Laptop ermöglicht. Dafür muss ein Arduino-Code auf das Arduino-Board geladen werden. Das Muscle Spiker Shield wird nun mit einem Kabel mit den Elektroden verbunden. Je stärker man nun die Faust ballt, leuchten mehr LEDs auf. Wird die Faust nur leicht zusammengepresst, gehen nur die grünen Lichter an, wird sie fester zusammengepresst, leuchten auch die orangen und sogar die roten LEDs auf.
Servo-Motor ansteuern mit dem Muscle Spiker Shield
Mit dem Muscle Spiker Shield lässt sich auch ein Servo-Motor ansteuern. Dafür wird nochmals eine andere Arduino-Software benötigt. Da der Servo-Motor sehr viel Strom braucht, wird eine separate Energiequelle verwendet. Je nachdem wie stark man die Faust ballt, richtet sich der Servo-Motor in einem bestimmten Winkel aus.
Die Hand ist entspannt, der Servo ist in der Ausgangsposition
Die Faust ist geballt, der Servo hat sich ausgerichtet


DIY-MedTech Fotografie - Team Giraffe
MedTech DIY Modul
Montag
Am Vormittag lernten wir erstmals unsere Kursleiter kennen. In etwas langen Präsentationen stellten Urs Gaudenz und Mark Dusseiller sich und ihren beruflichen Werdegang vor. Am Nachmittag nahmen wir das FabLab in Beschlag, stellten uns in unsere Gruppen auf und richteten unsere Arbeitsplätze ein. Anschließend begannen wir uns bereits an unser erstes Projekt. Die Aufgabe war auf eine Printplatte einen Schaltplan zu löten. Danach konnte sie in Betrieb genommen werden und mit Hilfe dieser die elektrischen Impulse (nervöse Erregungen) gemessen werden, welche vom Hirn zur Muskelzelle geleitet werden.

Dienstag Heart and Brain Spikershield
Am Vormittag experimentierten wir noch weiter mit der erstellten Printplatte.
Nach erfolgreichem Experimentieren mit der selbst erstellten Printplatte, widmeten wir uns dem anspruchsvolleren Teil. Mit dem Heart and Brain Spikershield Print, welche fertig eingekauft wurde. Die Idee war es, die Hirnströme zu messen. Mit einem Stirnband welches zwei Elektrodenannschlüsse besitzt und einer zusätzlichen Elektrode am Nacken, versuchten wir diese Ströme zu messen. Dieser Versuch war aber schwieriger als gedacht. Nach mehrmaligem probieren scheiterten wir schlussendlich. Die Signale, welche auf dem PC angezeigt wurden, waren nicht identifizierbar. Nur ein rauschendes eher konstantes Signal war zu erkennen.
Mögliche Fehlerquellen:
- Sehr niedrige Hirnströme, welche durch umliegende elektrische Stromfelder untergehen.
- Schlecht platzierte Elektroden, dass eine Messung nicht möglich war.
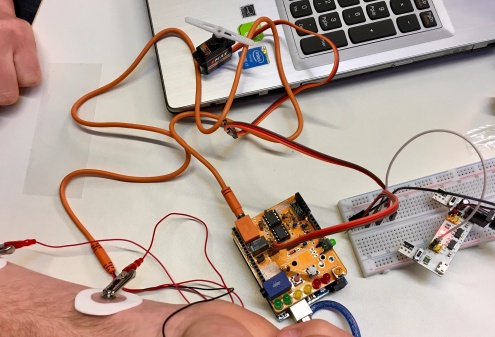
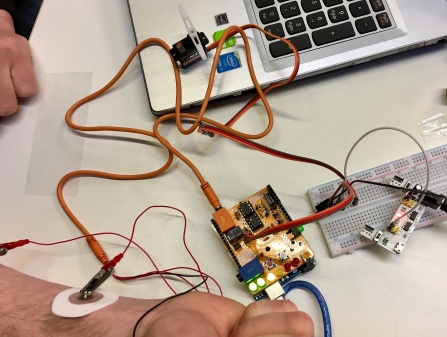
Nach dem gescheiterten Versuch, wurde ein der Fokus auf den nächsten Versuch gelegt. Dabei galt es den Puls eines Probanden mit Hilfe des Heart and Brain Spikershield Prints zu messen, dazu wurden Messelektroden an beide Hände angebracht, sodass Messstrecke über das Herz verlief. Das Messsignal wurde durch eine Applikation auf dem Computer angezeigt. Nach einigen Einstellungen wie Tiefpassfilter und Abtastrate konnte der Ruhepuls klar angezeigt werden. Nach ein paar Liegestütze, eine geringe Belastung des Herzes, stieg die Herzfrequenz an.

Anbringung der Messelektroden fürs Pulsmessung im Fablab Luzern
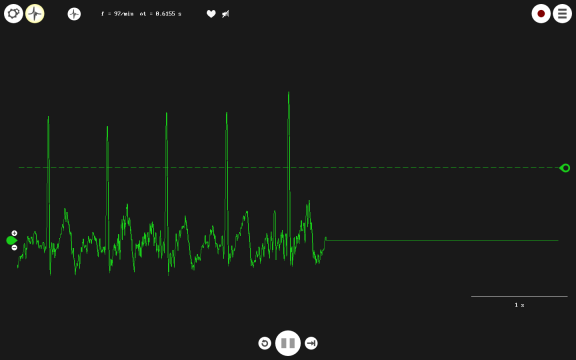
erhöhter Puls nach Liegestützen

Yao gibt vollen Einsatz



Die Messwerte und das Messsignal erschien uns plausibel, jedoch konnte die Genauigkeit des Heart and Brain Spikershield Prints nicht bestimmt werden, da kein kalibrirtes Vergleichsgerät zur Verfügung stand.
Mittwoch
Am Morgen waren wieder Skill Share Sessions.
In der Skill Share Session "DIY-MedTech Dumspter Diving - Team Gaudi" wurde zuerst geklärt, was Dumpster Diving bedeutet. Danach wurde über die Bedeutung verschiedener Dumpster Divings und die Gründe für Dumpster Diving diskutiert. Anschliessend konnten wir noch selbst alten Elektro Müll im Keller durchsuchen nach etwas bebrauchbarem. Wir entschieden uns für eine Harddisk. Diese demontierten wir und versuchten den brushless Motor anzusteuern, welches uns schlussendlich gelang.
Auch am Nachmittag wurden wieder Skill Share Sessions angeboten. Dieses Mal ging es um den 3-D Druck. Es wurde kurz erklärt, wie der Drucker funktioniert und wie man ihn bedient. Ebenfalls sind die verschiedenen Varianten vom 3-D Druck kurz erwähnt worden.
Mittwoch/Donnerstag Prototyp 1
Anschliessend konnten wir uns dem Prototyping widmen und erste Ideen sammeln für ein Projekt. Wir entschieden uns etwas mit einem Neopixel Ring zu entwickeln. Die Realisierung der Logik unserer Idee erfolge über ein Arduino Uno (externer Verweis auf Arduino), da jedoch keiner in unserem Team grossartig Programmiererfahrungen hatte, gestallte sich die als schwiriges Unternehmen. Zunächst musste zur Kopplung von Arduino und Computer die erforderliche Software installiert werden. Danach konnten erste Versuche mit dem Arduino unternommen werden, wie zum Bespiel Ansteuerung einer LED und später von einem LED-Ring. Das gestaltete sich durch bereits vorhandene Library als einfach.
Die Komplikationen sind dann aufgetreten, als es zur Umsetzung eigener Ideen kam, beziehungsweise Verknüpfung von mehreren Funktionen. Die Bespielcodes mussten genaustens studiert werden um einen neuen Code zu erstellen. Uns war es schliesslich möglich mittels Muskelkontration den LED-Ring zum aufleuchten zu bringen.
Am nächst folgendem Tag versuchten wir anstelle des LED-Rings einen Servomotor anzusteueren. Dies war jedoch ein schwiriges Unterfangen, da es wieder am Programmieren scheiterte. Als LED und Motor über die selbe Leitung liefen, sprach nur die LED's auf die Muskelkontraktion an. Der Servomotor bewegte sich auf Inputs nur spontan an. Durch Erweiterung des Muscle Spiker Shield konnte der Servomotor über andere Pins des Prints gesteuert werden. Allerdings war ein konstantes pulsierendes Signal auf der Steuerleitung, sodass auch der Servomotor hin und her pulsierte.
Aus unseren ersten Versuchen hatte sich verschiedene mögliche Anwendungen ergeben können. Vorstellbar wäre eine Brust-, Schultermuskulaturgesteuerte Protese mit anzeigbare Greifkraft. Sodass das zugreifende Objekt nicht zerquetscht wird. Einen physischen Prototyp konnte aus programmiertechnisch und zeitlichen Gründen nicht umgesetzt werden.
Donnerstag Prototyp 2
Nachden unseren bescheidenen Programmiererfahrungen beschlossen wir nach etwas eifacherem zu sehen. An der Prototypenpräsentation aller Gruppen konnten wir einige Ideen sammeln und bemerkten, dass die meisten Gruppen sich auf das Muscle Spike Shield oder etwas ähnliches fokussierten. In einer Gruppendiskussion kamen wir zum Schluss uns mehr mechanisch mit einem Prototypen zu befassen und dazu auch den Lasercutter oder den 3D-Drucker zu gebrauchen. Wir sammelten einige Ideen aber es war zu Beginn schwierig etwas zu finden, das nicht auf eine Steuerung oder Sensoren angewiesen ist. Wir schauten die auf dem Tisch ausgelegten Medizinprodukte an und kamen auf die Idee ein Produkt zu entwickeln, das es uns ermöglicht einen gebrauchten Verband schnell und einfach wieder aufzurollen. Diese Wickelmaschine soll einfach über einen Potentiometer einen Gleichstrommotor steuern, der eine Wickelrolle antreibt. Inspiration fanden wir auf Youtube [1], wo ein bereits bestehendes Modell gezeigt wird. Das Gelernte aus den Skill-Share-Session konnten wir nutzen und bereiteten erste CAD-Modelle für den 3D-Druck und Laser vor. Nach einigem Suchen fanden wir auch einen DC-Motor und hängten diesen an ein Potentiometer an.
Freitag
Heute ist Endspurt angesagt!
Unser Gehäuse für die Wickelmaschine besteht aus vielen kleinen Teilen, die mit dem Lasercutter geschnitten und dann zusammengesetzt werden müssen. Die Erstellung des Modells ist recht zeitintensiv und kurz vor dem Lasern merken wir, dass wir eine falsche Dicke angenommen haben. Diese Anpassungen haben wir erst nach dem Mittag fertig.
Der Motor ist grundsätzlich ebenfalls funktionstüchtig, allerdings beginnt er erst zu drehen, wenn das Potentiometer etwa 90% aufgedreht ist. Auch ist es recht schwierig, eine angemessene Drehgeschwindigkeit einzustellen. Dieses Problem wollen wir lösen mit dem Einsetzen eines einfachen Widerstandes parallel zum Motor, der den Gesamtwiderstand etwas verringern soll und der Motor damit schneller genug Strom erhält.
Samstag
Gelerntes aus Medtech DIY
Inputs
Von den meisten unserer Mentoren erhielten wir Einsicht in viele kleine und grosse Projekte. Vor allem Urs und Marc haben uns immer wieder zwischendurch eines ihrer abgeschlossenen oder momentanen Projekte gezeigt und damit den "Unterricht" etwas aufgelockert. Wann immer wir Fragen hatten, konnten wir jemanden von unseren 6 Mentoren fragen (allerdings waren nicht alle zu jederzeit da) und erhielten meist auch nützliche Antworten.
Bei Wilhelm Hilger erhielten wir eine super Übersicht über die Anforderungen an ein Medizinprodukt und wie diese reguliert werden. Wie die Medizintechnik-Studenten schon wussten, erweist sich die Regulierung als grosser Stolperstein, da sie eine lückenlose Dokumentation und Überwachung in jeder Lebensphase des Produktes fordert. Gerade im Moment ist der europäische Markt in einem grossen Umbruch, da von einer alten Regulierung (MDD) auf die modernere MDR umgestellt wird. Aus Willis Sicht besteht eine grosse Gefahr, dass Innovation verhindert wird, da vor allem kleinere Firmen extremen Mehraufwand erfahren werden und viele Produkte allgemein wirtschaftlich nicht mehr attraktiv sein werden durch den extrem erhöhten Überwachungsbedarf.
Skill Share Sessions
Bei den Skill Share Sessions 3D-Druck und Lasercutter lernten wir nützliche Maschinen kennen, die im FabLab stehen und die wir selber (nach einer kurzen Einführung) auch benutzen können. Für die Erstellung unserer Prototypen und natürlich auch für die Zukunft ist dieses Wissen sicherlich nützlich. Beide Maschinen sind sehr benutzerfreundlich und liefern schnell gute Ergebnisse ab. Mit steigender Erfahrung können auch die Einstellungen so verbessert werden, dass hergestellte Objekte noch etwas besser aussehen.
Bei der Photoshop Skill Session erhielten wir eine gute Übersicht über einige vorhandene Werkzeuge und wofür sie genutzt werden können. Das Program ist viel zu komplex, um die meisten Funktionen darin nur anzukratzen, allerdings wurden uns nützliche Tipps gegeben, die die zukünftige Nutzung vereinfachen. Für einfachere Aufgaben reichen die Grundwerkzeuge, die auch von Laien schnell gefunden und benutzt werden können.
Impressionen

Weitere Links
Backyard Brains Pulsmessung: [2]
Backyard Brains Muscle Spiker: [3]
Zurück zu Medizintechnik DIY