Team Dagobert
Contents
Einleitung
Die Blockwoche "Medizintechnik DIY" hat zum Ziel, die Anwendung der Medizintechnik als Gruppe mit dem Do-It-Yourself Ansatz zu verbinden. Dabei wird uns die ganze Woche das Muscle SpikerShield begleiten, mit welchem wir verschiedenste Experimente durchführen und Prototypen erarbeiten werden. Auf dieser Seite finden Sie die Herausforderungen, welchen wir uns als Gruppe gestellt haben und die Erfahrungen, welche wir in dieser einzigartigen Woche machen durften. Zudem ist eine allgemeine Zusammenfassung in Form eines Tagesjournals vorhanden.
Teammitglieder
Christoph Binkert
Student Maschinentechnik, 7. Semester, Elefantenliebhaber und interessiert über die Rätoromanische Sprache sowie die Fähigkeit den Skiservice in Zukunft selber durchzuführen.
Dat Nguyen
Student Maschinentechnik, 9. Semester, Pinguinliebhaber und ebenfalls interessiert über die Rätoromanische Sprache sowie die Fähigkeit den Skiservice in Zukunft selber durchzuführen.
Zudem ist Dat der unumstrittene Drohnenexperte.
Andrea Haefele
Studentin Wirtschaftsingenieur, 8. Semester, Quokkaliebhaberin und interessiert über das Human Machine Interface und die Bildgebende Verfahren.
Journal
Montag
Am Montag früh war der Start in die Blockwoche Medizintechnik DIY im FabLab der Hochschule Luzern. Zu beginn wurden wir mittels Inputreferaten in die Thematik eingeführt. Zudem wurden wir auch in verschiedene Gruppen eingeteilt, in welchen wir dann am Nachmittag mit dem Löten des Muscle SpikerSheld begonnen haben.
Zum Schluss haben wir noch eine Einführung in die Hackteria-Welt bekommen, so dass wir nun unsere Eindrücke und Erfahrungen hier erfassen und teilen können.
Dienstag
Den zweiten Tag haben wir mit den weiterführenden Arbeiten am Muscle SpikerShield begonnen. Mit dem fertig gelöteten Shield und einem Arduino Uno konnten wir verschiedene Experimente durchführen. So haben wir zum Beispiel unsere Herzfrequenz messen können oder einen LED Ring mit unserer Unterarmmuskulatur verschieden ansteuern.
An der Pinwand konnten wir den ganzen Tag unsere persönlichen Skills anbringen beziehungsweise konnten wir zum Ausdruck bringen, was für gerne zusätzlich diese Woche erlernen möchten. Es ergab sich eine grosse Bandbreite von Skills, von welchen in den kommenden Tagen die meistgewünschten durchgeführt werden.
Ebenfalls war heute die Einführung in den Maschienenpark des FabLab's durch unserer Betreuer sowie den FabLab Manager. Dies war eine super Gelegenheit, um die Lasercutmaschine sowie den 3D-Druck Park kennen zu lernen.
Am späteren Nachmittag sind dann die beiden Gäste Emma und Daniel aus Genf angereist, welche als musikalische Künstler uns allen ein kleines Konzert hielten. Dies rundete, zusammen mit einigen Snacks und Bier, den Abend ab.
Mittwoch

Heute haben die Skillsessions begonnen. Unseres Teams nutzte diese Chance und besuchte den DIY-MedTech Rätoromanisch Grundkurs - Team Han Solo, welcher interessante Einblicke in die Geschichte und die Vielfalt unserer vierten Landessprache gab. Einen Rundgang durchs FabLab, bei dem alle Teams ihre Erkenntnisse, Erfolge und Problemstellungen erläuterten, gab es auch. Bei einem kurzen Rückblick an der Sonne konnten alle Blockwochen-Teilnehmer ein erstes Feedback geben und die anderen wissen lassen, was in einem vorgeht.
Nach der Mittagspause gab es ein Vortrag von Effi Tanner, in welchem Sie von ihrem Werdegang und den darin vorkommenden Projekten erzählte. Nebenbei haben wir mit den im FabLab vorhandenen Maschinen experimentiert, um sie etwas besser kennen zu lernen. So ist diese Rakete entstanden, welche von der Comicserie "Schritte auf dem Mond" [1] von Tim und Struppi stammt. Diese Rakete war deshalb so interessant zu drucken, da sie aus mehreren Einzelteilen besteht, welche sich nach dem Drucken zusammenfügen liessen.
Donnerstag
Heute fand ein weiterer Rundgang bei allen Teams statt, bei welchen die neusten Erkenntnisse und Probleme diskutiert werden konnten. Dies ist sehr hilfreich, denn dadurch weis man welche Teams einem bei Problemen weiterhelfen können.
Zudem besuchte Andrea die Skillsessions DIY-MedTech Human-Computer-Interfaces - gaudi und Team_Champs#Skill_Share:_Bildgebende_Verfahren unser Gruppenmitglied Dat führte die Skillsession DIY-MedTech Dronen fliegen - Team Dagobert durch.
In der Skill Share Session "Bildgebende Verfahren" wurden, wie der Name der Session sagt, bildgebende Verfahren, welche unter anderem in der Medizin genutzt werden, vorgestellt. Behandelt wurden die Computer Tomographie (CT) und die Magnet Resonanz Tomographie (MRT/MRI). Während der Session wurden einerseits die technische Funktionsweise und andererseits die Anwendungsgebiete vorgestellt.
In der Skill Share Session Human-Computer-Interfaces stellte Urs Gaudenz verschiedene Arten von Interfaces vor und betrachtete den Begriff Interface etwas näher. Als Abrundung zeigte er den Teilnehmern verschiedene Beispiele von Interfaces, die er selber oder Künstler umgesetzt haben.
Am Nachmittag hatten wir die Möglichkeit uns via Skype mit Greg Gage von Backyard Brains zu unterhalten. Wir konnten ihm unsere Fragen stellen und ein teil unserer Experimente zeigen - und er liess uns ein kleinen Einblick in seinen Alltag sehen.
Freitag

Der heutige Tag begann mit einer Skillsession über den Ski-/Snowboardservice. In kleinen Gruppen wurden an drei Snowboards der Service durchgeführt, welcher das Nachziehen der Kanten, Belagsausbesserungen und das Wachsen beinhalteten. Viele waren erstaunt darüber, wie einfach und mit welch primitiven Mitteln dies möglich ist - unter anderem mit Teilen, welche hier am FabLab im Lasercutter hergestellt wurden.
Samstag
Der letzten Vormittag war die Gelegenheit, die Erfolge und auch Missgeschicke von allen anderen Teams zu lernen. Viele interessante Projekte wurden präsentiert. Vom Windrad bis zu einer mobile Infusion-System für die "Wanderungssüchtiger" gab es alles. Zum Schluss fand noch eine Reflexion der ganzen Woche statt. Vielen Dank an alle Dozenten und Fablab für dieses spannendes Erlebnis.
Durchgeführt am Donnerstag 13:00-13:30
DIY-MedTech Dronen fliegen - Team Dagobert
Projekte
Experiment Heart Rate
Um die Arduinos und die verschiedenen Zusatzmodule von Backyard Brains besser kennenzulernen wurden verschiedene Experimente durchgeführt. Das erste Experiment, welches Team Dagobert durchführte, war ein Experiment, mit dem mittels verschiedenen Elektroden über ein Arduino der Puls gemessen und auf einem Programm dargestellt werden sollten.
Versuchsaufbau
Für den Versuch wurden folgende Module verwendet:
Das Heart and Brain Spiker Shield wurde auf dem Arduino Uno angebracht und so auch über das Arduino mit Strom versorgt.
Die Elektroden wurden an der Versuchsperson angebracht. Zwei davon jeweils auf dem und eine auf dem Handrücken einer der Hände. Nach dem Anbringen der Elektroden wurden diese Verkabelt und mit dem Heart and Brain Spiker Shield verbunden.
Auf den Arduino wurde der Code gemäss der Anleitung auf der Webseite von Backyard Brains geladen. Das Arduino wurde mit USB Kabel mit dem Laptop verbunden, auf dem Laptop musste zudem das Programm Spike Recorder von Backyard Brains installiert werden.

Versuchsdurchführung
Nach dem Versuchsaufbau war die Durchführung relativ einfach. Auf dem Programm auf dem Computer zeigten sich sofort Daten.
Leider schienen diese keine Herzschläge zu sein wie wir erwartet hätten.
Nach einer kurzen Suche in den Einstellungen zeigte sich, dass die angezeigten Daten Aufnahmen des Mikrofons des Computers waren, und nicht Daten vom angeschlossenen Arduino.
Auch dieses Problem liess sich jedoch schnell beheben, in den Einstellungen musste lediglich vom Mikrofon auf das Arduino umgestellt werden. Sobald dies erfolgt war, zeigten sich im Recorder Daten, die einem Herzschlag schon viel näher kamen.
Nach einigen Anpassungen an den Anzeigeparametern konnten erfolgreich die Herzschläge abgelesen werden und das Experiment mit Erfolg beendet werden.
Experiment Brain Activity
Beflügelt vom Erfolg des ersten Experiments nahm sich das Team vor, gleich auch noch ein weiteres Experiment mit dem Heart and Brain Spiker Shield durchzuführen - zur Messung von Hirnströmen.
Versuchsaufbau

Für den Versuch wurden folgende Module verwendet:
- Arduino Uno
- Heart and Brain Spiker Shield (Backyard Brains)
- Elektroden
- Stirnband für die Befestigung der Elektroden am Kopf
Der Versuchsaufbau war ziemlich ähnlich wie beim Heart Rate experiment, weshalb dies auch schnell umgesetzt war.
Die Elektroden wurden nun nicht mehr länger an den Armen angebracht, sondern am Kopf. Zwei davon wurden mit einem Stirnband befestigt, die letzte wurde hinter dem Ohr angebracht.
Am Setup des Arduino und des Hear and Brain Spiker Shields musste nichts geändert werden.
Versuchsdurchführung
Die Durchführung stellte sich auch als relativ problemlos heraus. Die Verkabelung der Geräte war kaum anders als beim erstem Experiment, die Elektroden waren auch schnell umplatziert. So war es auch nicht überraschend, dass bereits nach kurzer Zeit Messwerte auf dem SpikeRecorder ausgegeben wurden.
Im Team Dagobert ist kein Medizintechnik-Student eingeteilt und die Teammitglieder konnten nicht viel aus den Daten herauslesen. So war es zwar ein erfolgreiches Experiment, daran gemessen, dass Daten ausgegeben wurden. Ob diese Daten sinnvoll waren, oder ob primär Störgeräusche aufgezeichent wurden, konnte aber leider nicht festgestellt werden.
So entschied sich Team Dagobert mit dem Muscle Shield weiterzumachen.
Experiment Muscle Activity

Im Experiment Muscle Activity ging es darum, mit Elektroden die Muskelaktivität zu messen. HIerfür wurde ein anderes Modul von Backyard Brains verwendet. Dieses lag jedoch nicht fertig vor, sondern musste vom Team zuerst zusammengebaut und gelötet werden.
Hierfür wurden zuerst die verschiedenen Teile gesichtet und dann auf der Webseite von Backyard Brains nach der Anleitung gesucht. Das Problem, auf welches das Team hierbei stiess war, dass die Anleitung für eine frühere Version des Moduls geschrieben war und das Modul sich seither stark verändert hat. Also musste das Team sich Informationen aus verschiedenen Anleitungen zusammensuchen und sich bei den restlichen Punkten auf die eigenen Instinkte und Einschätzungen verlassen.
Das Resultat konnte sich sehen lassen, bis auf einige kosmetische Anpassungen an den Lötstellen musste nichts nachträglich angepasst werden.
Versuchsaufbau
Für den Versuch wurden folgende Module verwendet:
Der Zusammenbau der Komponenten war ähnlich wie in den ersten zwei Experimenten. Das Muscle Spiker Shield wurde auf dem Arduino angebracht und die Kabel zu den Elektroden eingesteckt. Die Elektroden wurden etwas anders angebracht, zwei davon wurden auf dem gleichen Unterarm hintereinander angebracht, die dritte auf dem Handrücken. Wiederum wurden die Kabel an den Elektroden angebracht und der Aufbau des Versuchs war fertig.
Für dieses Experiment musste auch ein anderer Code auf das Arduino geladen werden, und die Daten konnten am Computer direkt mit dem Serial Monitor der Arduino Applikation angezeigt werden, das SpikerRecorder Programm von Backyard Brains wurde nicht benötigt.
Versuchsdurchführung
Nachdem die Komponenten miteinander verkabelt und mit dem richtigen Code versehen waren, konnte der Versuch durchgeführt werden. Die Elektroden wurden mit dem Arduino verbunden und der Serial Monitor auf dem Laptop geöffnet. Schnell wurden auch Daten angezeigt.
Neben den Daten auf dem Serial Monitor enthält der Code auch Befehle die die sechs, auf dem Muscle Spiker Shield angebrachten LEDs ansteuert. Je nach Stärke der Muskelkontraktion leuchteten zwischen einem und sechs LEDs.
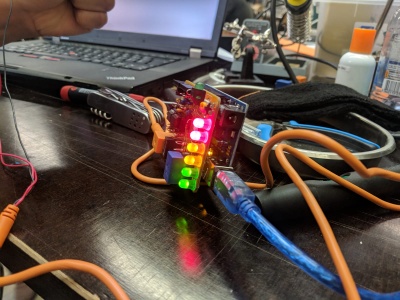
Muskelaktivität hoch
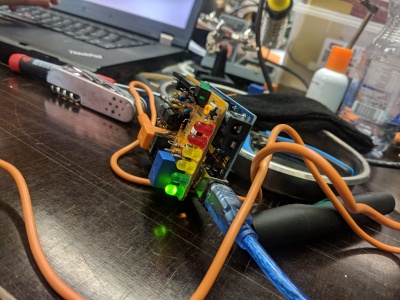
Muskelaktivität tief


Anfangs hatte das Team etwas Mühe, die richtigen Einstellungen zu finden, um die LEDs zu kontrollieren - entweder leuchteten jeweils alle oder keines - nach etwas "pröbeln" konnten aber auch dieses Problem gelöst werden. Auch das Platzieren der Elektroden musste ausprobiert werden, gewisse Positionen funktionieren besser als andere. Zu guter Letzt konnte aber im Versuch viel über die Funktionsweise des Moduls und den Umgang mit den Elektroden und Messwerten gelernt werden.
Experiment LED Ring
Nach dem erfolgreichen Experiment mit dem Muscle Spiker Shield und den darauf verbauten LEDs hat das Team sich zum Ziel genommen, mit den Shield eine neue Komponente anzusteuern. Nach kurzer Suche wurde ein LED-Ring gefunden, welcher auf dem Shield befestigt werden konnte. Als erstes Experiment, das nicht dem Versuchsaufbau eines Experiments von Backyard Brains entsprach, musste das Team nun vollkommen frei nach Lösungen für die Ansteuerung des LED Rings suchen.
Nachdem der Ring als ein "NeoPixel" Modul identifiziert war, konnten im Internet schnell Beispiele und Anleitungen gefunden werden. Zudem wurde die Library für das Arduino gefunden, welche verwendet werden kann um die NeoPixel Module anzusteuern.
Versuchsaufbau

Verwendete Materialien:
- Mikrocontroller: Arduino
- Muscle Spike Shield
- Elektroden
- Zusatz: NeoPixel RGB LED Ring (Adafruit)
Als Weiterführung von vorherigen Experimente, der LED Ring ist nun zusätzlich mit Arduino Board verbunden:
- DC in: 5V (konstant)
- Ground
- Data in: Digital Pin 6 (Arduino PWM pin)
Für dieses Experiment musste zusätzliche Code-Bibliotheken installiert werden, nämlich Adafruit Neo Pixel. Zudem musste der Code so erweitert werden, dass die Signalwerte der gemessenen Stärke der Muskelaktivität nicht nur auf die LEDS auf dem Shiel und den Serial Port ausgegeben, sondern auch über einen Pin an das NeoPixel Modul ausgespielt werden.
Versuchsdurchführung
Die Elektroden nehmen die Muskelaktivitäten auf und liefern die Messdaten an Arduino. Die Rawdata kann man via Serial Monitor ansehen. Diese dienen auch als Trigger-Signal für das Ab-/Anschalten des LED-Rings. Abhängig von der Stärke der Muskelaktivität wird ein jeweils anderes LED am Ring in einer anderen Farbe (magenta) angezeigt. Zusätzlich kann man die Signalstärke mittels Anzahl der leuchtenden LEDs auf dem Muscle Spiker Shield erkennen.
Bei diesem Experiment traten im ersten Versuch Probleme auf, als versucht wurde, die Helligkeit der LEDs auf dem LED Ring in Abhängigkeit von der Stärke der Muskelaktivität zu steuern. Nach etwas Recherche stellte sich jedoch heraus, dass die Library nicht darauf ausgelegt ist, die Helligkeit dynamisch zu regeln und dies deshalb Probleme bereitet. Um trotzdem die Stärke der Muskelaktivität abbilden zu können wurde deshalb der Code so umgeschrieben, dass nicht die Helligkeit verändert wird, sondern die Farbe einzelner LEDs. Dies funktionierte relativ schnell und ohne grössere Probleme.
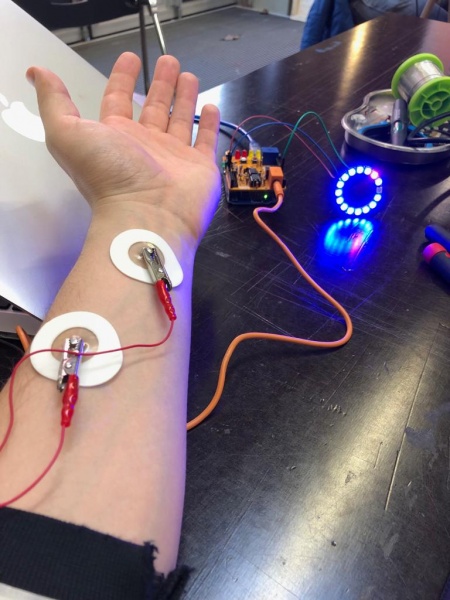
Muskelaktivität tief
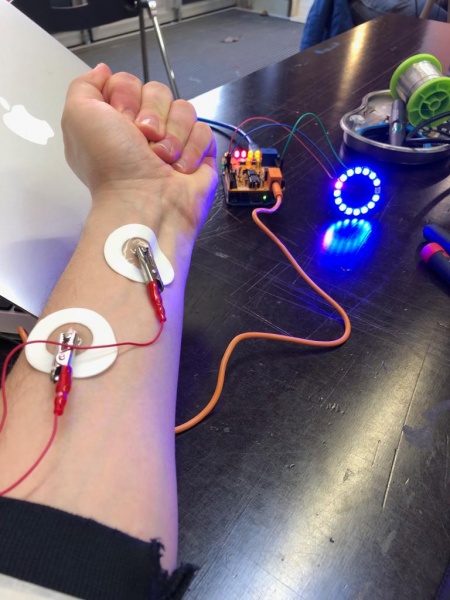
Muskelaktivität hoch


Experiment Servo
Nach dem Tüfteln mit dem LED Ring galt es langsam Ideen zu suchen, die in den nachfolgenden Prototypen weiterverfolgt werden sollten. Im Fundus des FabLab fand das Team einen Servomotor und nahm sich zum Ziel, diesen mit Muskelkontraktionen zu steuern.
Dafür musste ermittelt werden, wie der Servomotor an das Arduino angeschlossen werden konnte. Danach musste die Steuerung des Servos im Code eingebaut werden.
Versuchsaufbau
Für den Versuchsaufbau wurde wiederum das Arduino-Muscle Spiker Shield Setup verwendet. Anstatt dem LED Ring vom vorhergehenden Experiment wurde jetzt der Servomotor verwendet.
- Mikrocontroller: Arduino
- Muscle Spike Shield
- Elektroden
- Zusatz: Servomotor
Der Servomotor verfügt über drei Anschlusskabel. Das erste wurde am Ground Pin des Arduino angebracht, das zweite an der 5V Speisung um den Motor mit Strom zu versorgen.
Das dritte Kabel dient zur Übermittlung der Steuerungsdaten. Dieses wurde an einen der Digital Out Pins gelegt, der Pulse-width modulation erlaubt. Dies wird, so hat die Recherche eines anderen Teams gezeigt, für die Steuerung von Servomotoren über das Arduino benötigt.
Der Code auf dem Arduino musste ebenfalls umgeschrieben werden, sodass die Signale zur Steuerung des Servomotors über den Digital Pin ausgegeben werden. Hierfür wurde die Library Servo.h verwendet.
Versuchsdurchführung
Das Anpassen des Codes war relativ einfach, für die Library Servo.h gibt es bei Arduino verschiedene Beispiel Codes, aus denen die wichtigsten Funktionsweisen abgelesen werden konnten. Etwas schwieriger war es, die richtigen Einstellungen für die Sensitivität und die Delays der Messungen zu finden. Hier hatte das Team anfangs einige Probleme, die dann aber umgangen worden sind. Anstatt eine stufenlose Einstellung des Servomotors anzustreben versuchte das Team nun, zwei bestimmte Positionen anzufahren. Dies konnte mit einer einfachen if/else Programmierung bewerkstelligt werden.
Trotzdem waren die Messwerte irgendwie instabil. Immer wieder schienen sie "hängen zu bleiben" und eine Position nicht mehr zu verlassen. In anderen Situationen schien der Servo (und die LEDs am Muscle Shield), oder genauer gesagt die Messwerte ein "Eigenleben" zu entwickeln. Die Werte pendelten wild zwischen 0 und 6, die LEDs flackerten und der Servo bewegte sich wild hin und her.
Die Lösung dieses Problems gestaltete sich etwas schwieriger, nach einigen Versuchen konnten die Werte aber stabilisiert werden indem das Delay zwischen den Messungen erhöht wurde.
Prototyp 1
Am Mittwoch Mittag war das "Experimentieren" langsam zu Ende und es galt, einen ersten Prototypen zu entwickeln. Team Dagobert wollte mit dem Servomotor weiterarbeiten und überlegte sich deshalb, wie mit nur einem Servomotor ein Auto gesteuert werden könnte.
Im FabLab fand das Team ein kleines Auto, welches eine konstante Geschwindigkeit fährt. Dieses wird zentral an einer Achse gesteuert. Schnell kam dem Team die Idee, diese Achse mit dem Servo anzusteuern und so die Richtung des Autos zu kontrollieren.
Die Erkenntnisse zur Ansteuerung des Servos, beziehungsweise die Einschränkung, dass mit der Steuerung über die Muskelaktivität nur zwei Positionen zuverlässig angesteuert werden konnten, machte die Verwendung zur Steuerung eines Autos jedoch relativ unpraktisch. Um nicht zu viel Zeit zu verlieren versuchte das Team dann alternativ zur Steuerung eines Autos die Steuerung eines Greifers.
Greifer mit Steuerung durch Muskelaktivität

Für den Greifer musste zuerst ein Modell gefunden werden. Dieses fand Dat im Internet und konnte die Teile für den Greifer im Laser Cutter erstellen. Ein paar Schrauben und Muttern später war der Greifer fertig und einsatzbereit. Nun galt es, den Servomotor zur Steuerung am Greifer zu befestigen.
Schnell stellte sich heraus, dass die Einzelteile noch einige kleinere Anpassungen benötigten. Dies konnte ebenfalls mit dem Laser Cutter erledigt werden. Danach wurde noch eine Platte benötigt, um die Teile und den Servo zu stabilisieren. Auch diese konnte aus Plexiglas im Laser Cutter hergestellt werden.
Bei der Inbetriebnahme zeigten sich jedoch einige Probleme.
Einerseits war die Steuerung über die Muskelaktivität ein Problem. Dieses hatte verschiedene Ursachen. Einerseits war die Leistung des Arduino zu schwach um die komplette Gerätschaft zu betreiben. Eine externe Spannungsquelle konnte jedoch nicht angeschlossen werden, da im Set des Muscle Spiker Shield, das in dieser Woche zusammengebaut wurde, gewisse Einzelteile fehlten.
Dieses Problem konnte mit einer Suche nach den fehlenden Einzelteilen und der Installation dieser auf dem Muscle Spiker Shield behoben werden. Nun konnte ein Battery Pack an das Muscle Spiker Shield angehängt werden.
Leider löste auch dies das Problem der Steuerung noch nicht. Nach wie vor waren die Werte so lange gut kontrollierbar, wie der Servomotor nicht am Shield angebracht war. Sobald dieser angeschlossen wurde, wurden die Werte verfälscht und kaum kontrollierbar. Die Einstellung der Empfindlichkeit war extrem schwierig und oftmals konnte keine Position gefunden werden, in der die Steuerung möglich war.
Zudem schienen die Werte "hängen zu bleiben" und auch nach der Entspannung des Muskels behielt der Servomotor die Position bei. Dieses Problem konnte leider bis am Schluss nicht behoben werden.
Prototyp 2
Aufgrund der zeitlichen Begrenzung befinden wir sich in einer Zwangslage: ein optimaler Ausgang für das Prototyp #1 (voll Funktionsfähigkeit sowie auch die potentielle Anwendungsbereiche zu finden) oder eine neue Idee zu finden und verwirklichen.
Idee
Mittels der Lichtsensoren und Laser kann man den Abstand zwischen den Sensor und Messobjekt bestimmen. Da die Lichtgeschwindigkeit ist eine Konstant (c = approx. 300'000 km/s), die Strecke s ist gleich 0.5 * c * t. Mit diesem Wert kann man den Output von einem thermoelektrische cooler (TEC), aka Peltier-Elemente, regeln.
