Team Capybara 2023

Gruppenfoto Team Capybara

Contents
Über uns
Hallo! Wir sind die Capybaras - eine dynamische Gruppe von vier enthusiastischen Studierenden der MedTech DIY Blockwoche an der Hochschule Luzern. Warum der Name "Capybaras"? So wie das größte Nagetier der Welt, das in Gemeinschaft lebt und für seine Gelassenheit bekannt ist, streben auch wir danach, in Harmonie zu arbeiten, Hindernisse mit Ruhe und Bestimmtheit zu überwinden und innovative Lösungen im MedTech-Bereich zu entwickeln.
Unsere Vielfalt an Talenten und unser gemeinsames Interesse an Medizintechnologie treiben uns an, die Grenzen dessen, was möglich ist, zu erweitern. Mit unserer Neugierde und unserem Engagement setzen wir uns dafür ein, Technologie zum Nutzen aller zu gestalten.
Tritt mit uns in Kontakt und erfahre, wie die Capybaras die Welt der MedTech revolutionieren! 🌍🔬🛠️🦨
Team

|

|

|

|
| Mario Berchtold
Maschinenbauingenieur |
Fabio Issler
Wirtschaftsingenieur |
Severin Steiner
Medizintechnikingenieur |
Robert Trüb
Medizintechnikingenieur |
Stundenplan
Die kommenden Tage sind durch einen strukturierten und vorgegebenen Stundenplan organisiert, der sicherstellt, dass wir das gesamte Potenzial dieses Kurses ausschöpfen. Dieser Stundenplan dient als Leitfaden für die spannenden Aktivitäten, Diskussionen und Lerneinheiten, die vor uns liegen. Wir, die Capybaras, sind bereit, uns auf die bevorstehenden Herausforderungen einzulassen und das Maximum aus jeder Stunde herauszuholen. Werfen Sie einen Blick auf den Plan und begleiten Sie uns auf dieser lernreichen Reise! 📘📐🔬🦨
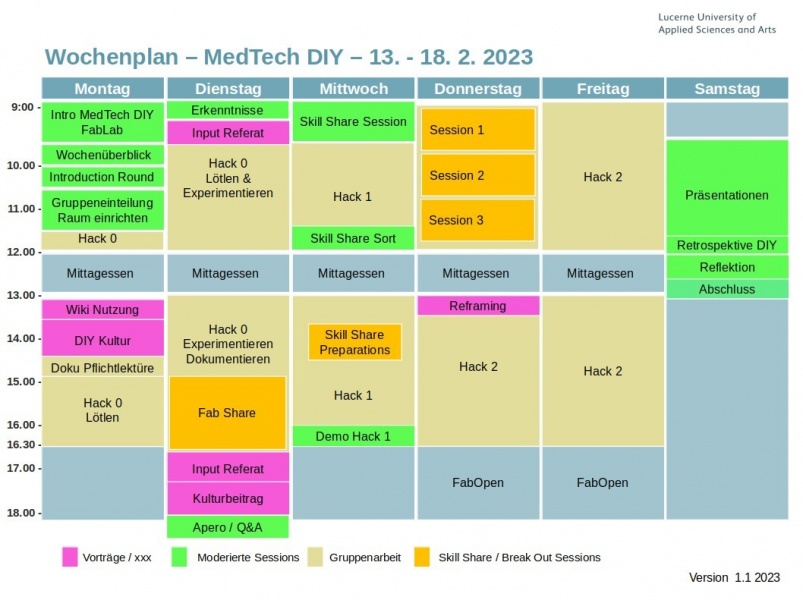
Stundenplan

Hacks
Hack 0 - Löten & Experimentieren
Im Hack 0 haben wir uns intensiv mit vier unterschiedlichen Themenbereichen auseinandergesetzt:
- Spannungsteiler und Arduino: Wir haben einen Spannungsteiler ausgewertet, um die Spannung mittels Arduino zu messen. Dieser Schritt war essentiell, um unsere Kenntnisse in der Elektronik zu vertiefen und die Verwendung von Mikrocontrollern effektiv zu verstehen.
- Messung des Körperwiderstands: Durch den Einsatz von zwei Elektroden haben wir den Körperwiderstand gemessen. Hierzu verwendeten wir zusätzlich einen Widerstand und einen Kondensator, um die Ergebnisse zu glätten. Dieses Experiment gab uns tiefe Einblicke in die physiologischen Aspekte des menschlichen Körpers und dessen Interaktion mit Elektronik.
- Muskelströme an den Augen: Anschließend haben wir uns mit der Messung von horizontalen und vertikalen Muskelströmen bei den Augen beschäftigt. Die Ergebnisse bestätigten, dass die Muskeln tatsächlich entlang der vorgegebenen Achsen lokalisiert sind. Dies war besonders aufschlussreich, um ein besseres Verständnis für bioelektrische Vorgänge zu bekommen.
- Lötübung - Chaosknoten: Zum Abschluss des Hack 0 wagten wir uns an eine anspruchsvolle Lötübung, den "Chaosknoten". Trotz seiner Komplexität stellten wir uns der Herausforderung. Sie erforderte höchste Konzentration und Fingerspitzengefühl von jedem von uns.
Insgesamt war Hack 0 eine bereichernde Erfahrung, die unser Wissen in MedTech weiter vertiefte und unsere praktischen Fähigkeiten schärfte.
Spannungsteiler
Der Spannungsteiler, den wir verwendet haben, wurde sorgfältig auf einem Steckbrett aufgebaut und mit dem Arduino verbunden. Mit Hilfe der Arduino IDE Software haben wir den entsprechenden Code erstellt und diesen auf den Arduino hochgeladen.
Ein Spannungsteiler ist eine grundlegende elektrische Schaltung, die sich insbesondere zur Aufteilung einer Eingangsspannung (Gesamtspannung) in eine kleinere Ausgangsspannung eignet. Dies wird durch die Verwendung von zwei oder mehr Widerständen in Serie realisiert. Die Verteilung der Spannung über die Widerstände erfolgt proportional zu deren Widerstandswerten. Das bedeutet, ein Widerstand mit höherem Wert wird auch eine höhere Spannung über sich haben als ein Widerstand mit geringerem Wert.
Dank dieser besonderen Eigenschaft konnten wir die Spannung hinter jedem Widerstand über einen Analog-Eingang des Arduino messen. Um die Ergebnisse unserer Messungen klar und verständlich darzustellen, wurden diese in einem Plot visualisiert. Dieser grafische Ansatz ermöglichte es uns, die Veränderungen und Unterschiede in den gemessenen Spannungen schnell zu erkennen und zu analysieren. Das Verständnis der Grundprinzipien eines Spannungsteilers in Kombination mit der visuellen Darstellung der Daten ermöglichte uns eine präzise und systematische Auswertung.


Körperwiderstand
Unsere jüngsten Forschungsarbeiten haben sich auf den Aufbau und die Messung von Körpersignalen konzentriert. Hierbei haben wir sorgfältig einen speziellen Aufbau entwickelt, um den Körperwiderstand zu messen. Der gesamte Prozess wurde mit einem Arduino-Mikrocontroller durchgeführt, der es uns ermöglichte, die erfassten Signale auf einem PC auszuwerten.
Der Aufbau für das Messen von Körpersignalen wurde präzise zusammengesteckt, um genaue Messungen zu gewährleisten. In der nachfolgenden Grafik ist dieser Aufbau detailliert dargestellt, sodass unsere Ergebnisse transparent und reproduzierbar sind.
Nachdem wir die Körpersignale erfasst hatten, haben wir die gesammelten Daten gründlich ausgewertet. Diese Auswertung war entscheidend, um wertvolle Erkenntnisse über die untersuchten Körpersignale zu gewinnen. Die Ergebnisse unserer Analyse sind in der nachfolgenden Grafik übersichtlich dargestellt, wodurch die Schlüsselinformationen leicht zugänglich sind.
Diese Forschungsarbeit markiert einen bedeutenden Fortschritt in unserem Verständnis von Körpersignalen und ihren Anwendungen. Der präzise Aufbau und die gründliche Datenanalyse tragen dazu bei, die Genauigkeit und Verlässlichkeit unserer Ergebnisse zu gewährleisten. Wir sind gespannt darauf, wie diese Erkenntnisse in Zukunft zur Verbesserung verschiedener Bereiche, wie der Medizin oder der Mensch-Computer-Interaktion, beitragen können.


Löten Chaosknoten
Um unsere Lötfähigkeiten zu verbessern, haben wir LEDs auf das Chaosknoten-Board gelötet. Dieses Projekt half uns nicht nur, unsere praktischen Fähigkeiten zu schärfen, sondern ermöglichte uns auch, die Funktionsweise von elektronischen Komponenten besser zu verstehen. Die LEDs fügten dem Chaosknoten eine faszinierende visuelle Dimension hinzu und boten eine Gelegenheit, Präzision und Teamarbeit zu üben. Es war erfreulich zu sehen, wie die LEDs nach erfolgreichem Löten zum Leben erwachten, und stärkte unser Vertrauen in unsere technischen Fähigkeiten.

Fabio am Löten

Chaosknoten


Hack 1 - Fortbewegung dank elektrischer Impulse
Die Idee für den Hack 1 ist, ein Fortbewegungsmittel anhand elektrischer Impulse zu steuern. Die Elektroimpulse, die von den Augen gesendet werden, navigieren das Fahrzeug. Durch einen Blick nach Links oder Rechts bewegt sich das Fortbewegungsmittel in diese Richtung. Durch Zusammenkneifen der Augen fährt es los und bei erneutem Zusammenkneifen hält das Fortbewegungsmittel wieder an.
Unser erstes Ziel war es, Signale von Elektroden, welche an den Augenmuskeln angebracht wurden, mittels eines Arduino auszuwerten. Um die Signale von drei Elektroden zu erfassen, benötigten wir zunächst die richtige Hardware. Zuerst mussten wir die Elektroden mit den analogen Eingängen des Arduino verbinden. Anschliessend wurden die drei Elektroden an der Haut aufgebracht und anschliessend konnten folgende Signale an den Graphen dargestellt werden. Im nachfolgenden Bild ist die Befestigung der Elektroden an einer Person gezeigt.

Test Körperwiderstand bei Severin

Tests
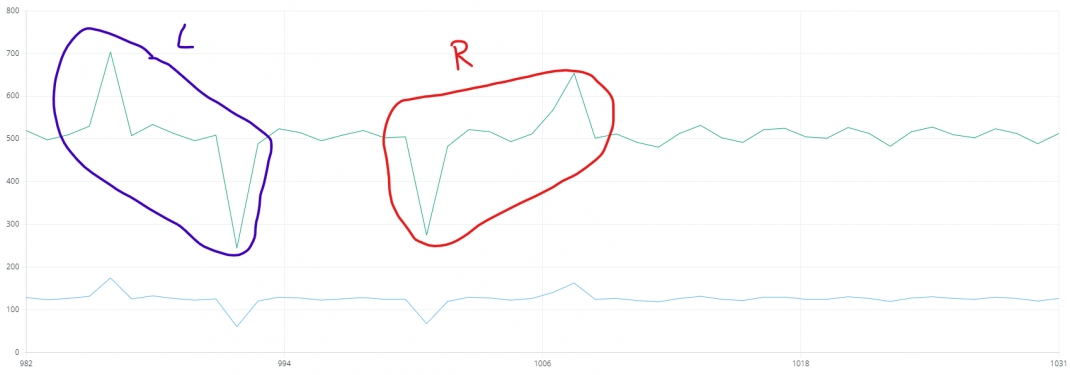
Test Robert Links Rechts

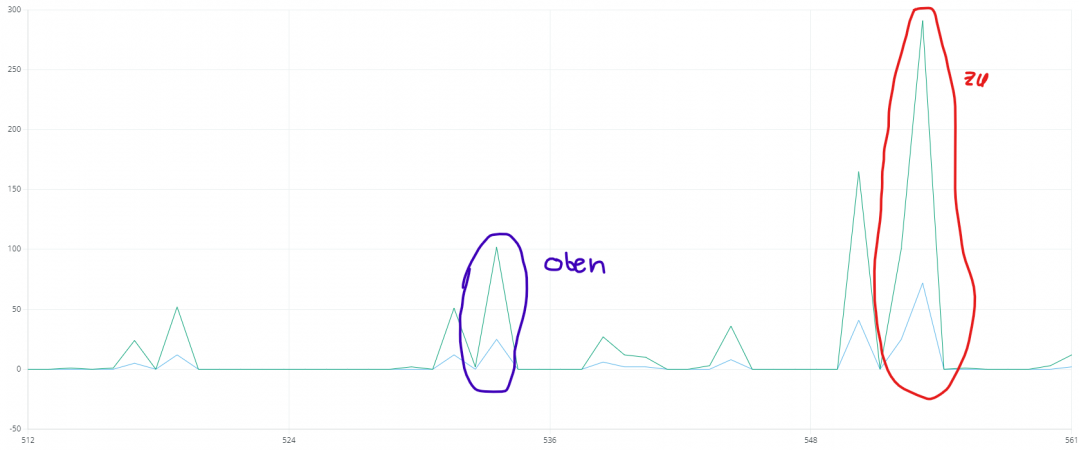
Test Robert Oben Unten

Auf den Graphen sehen wir, wie die elektrische Aktivität der Augen gemessen wird. Die linke Seite des Graphen zeigt die Auslenkungen des linken Auges, während die rechte Seite die Aktivität des rechten Auges darstellt. Es sind deutliche Ausschläge zu erkennen, als Robert das linke oder das rechte Auge zusammendrückte. Zusätzlich zu den Messungen an den Augen, welche die Links-Rechts-Aktivität festgehalten haben, hat unser Team noch Messungen vorgenommen, die beim nach Oben schauen und beim Zusammenkneifen der Augen erzeugt wurden.

Test Fabio Links Rechts


Test Fabio Oben Unten

Die selben Tests wurden anschliessend noch bei Fabio vorgenommen, um zu sehen, ob die Ergebnisse eine ähnliche Auslenkung haben wie bei Robert. Obwohl die Graphen von Robert und Fabio nicht identisch sind, können wir nach diesen Messungen sagen, dass anhand der Signale ein Fortbewegungsmittel angesteuert werden kann.
Umsetzung
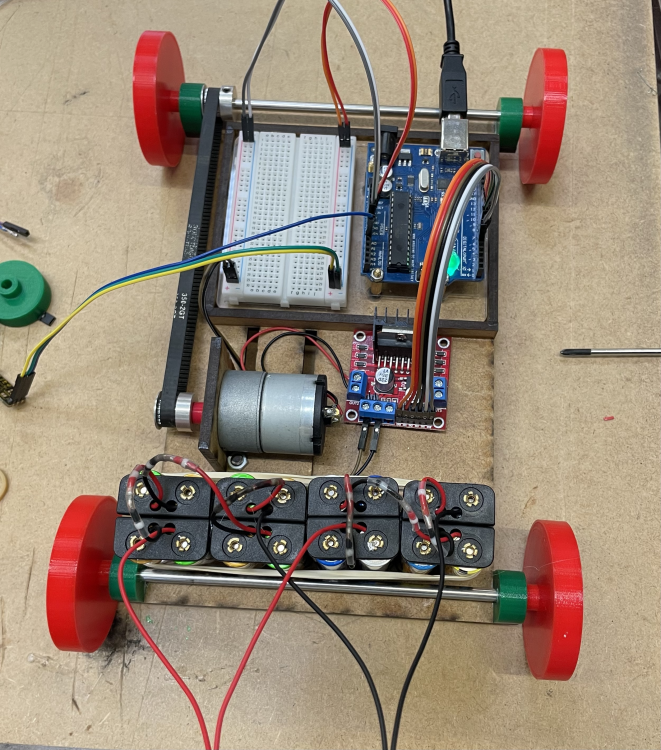
In unserem aufregenden DIY-Projekt haben wir uns aus Gründen der Komplexität und der zeitlichen Effizienz dafür entschieden, das Fahrzeug ausschließlich vorwärts zu bewegen, ohne die Möglichkeit zur links-rechts-Steuerung. Diese Entscheidung ermutigt uns, uns auf die Kernaspekte unseres Projekts zu fokussieren und die verfügbare Zeit und Energie bestmöglich zu nutzen.
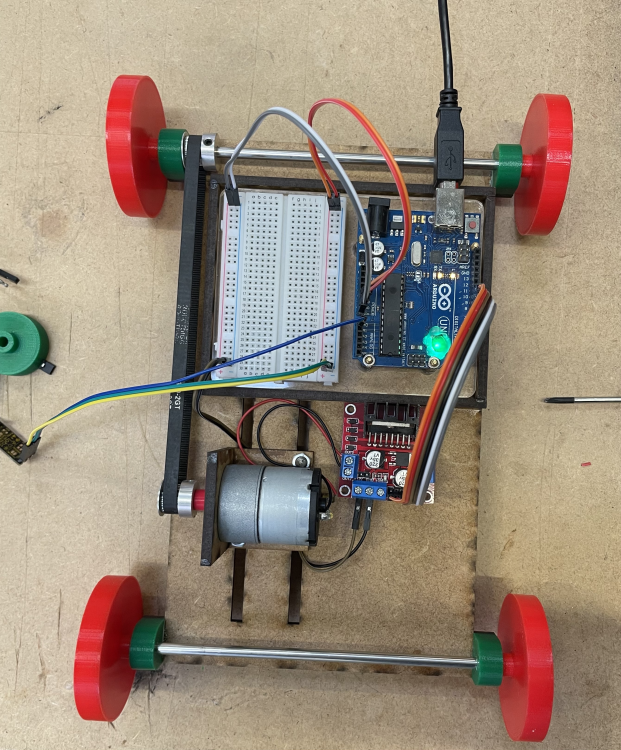
Fahrzeug ohne Batteriepacks
Fahrzeug mit Batteriepacks


Die Grundstruktur unseres Fahrzeugs besteht aus MDF-Platten. Diese robusten und dennoch leicht zu bearbeitenden Platten dienen als solide Basis, auf der das gesamte Projekt aufgebaut wird. Sie ermöglichen die einfache Anbringung von Komponenten, wie dem Motor, der Elektronik und den 3D-gedruckten Rädern. Die Räder des Fahrzeugs sind das Ergebnis modernster Fertigungstechnologie. Mit einem 3D-Drucker haben wir maßgeschneiderte Räder erstellt, die perfekt zu unserem Projekt passen. Diese Räder bieten nicht nur eine reibungslose Fortbewegung, sondern verleihen dem Fahrzeug auch einen einzigartigen, individuellen Look
Selbstgebaute Fortbewegungsmittel werden mit dem Zusammenspiel eines DC-Motors, einer H-Brücke und einem Arduino zu aufregenden Realitäten. Diese Komponenten sind die Bausteine einer Vielzahl von kreativen Anwendungen, bei denen die Bewegung und Steuerung von mechanischen Systemen im Vordergrund steht. Der DC-Motor ist das Herzstück dieses Systems und wandelt elektrische Energie in mechanische Bewegung um. Die H-Brücke ist ein elektronisches Schaltungsdesign, das die Richtung und Geschwindigkeit des DC-Motors steuert. Sie ermöglicht es dem Motor, vorwärts oder rückwärts zu drehen und Geschwindigkeiten zu variieren. Dieses Element ist unverzichtbar, um den Motor präzise zu kontrollieren. Der Arduino-Mikrocontroller ist das Gehirn hinter der Operation. Er ermöglicht die Programmierung und Steuerung des DC-Motors und der H-Brücke. Mit der Arduino-Plattform können Sie benutzerdefinierte Codes schreiben, um den Motor in Abhängigkeit von verschiedenen Bedingungen und Sensoren zu steuern
Die Gestaltung und Montage dieses Fahrzeugs erfordert nicht nur handwerkliches Geschick, sondern auch die Fähigkeit, technische Herausforderungen zu meistern. Es ist ein Projekt, das Wissen in den Bereichen Elektronik, Programmierung und Mechanik miteinander verknüpft und gleichzeitig Raum für kreative Anpassungen und Verbesserungen bietet.
Hack 2 - Umweltanhänger
In einer Zeit, in der Technologie und Nachhaltigkeit Hand in Hand gehen, haben wir uns für den Hack 2 für einen kleinen Fahrzeuganhänger entschieden. Hinter dieser Innovation steckt ein Arduino-Mikrocontroller, der in Verbindung mit einem CO2-/ Temperatursensor die Luftqualität in Echtzeit überwacht und auf einem Display die aktuelle Temperatur sowie die Feuchtigkeit anzeigt. Die Konstruktion besteht aus präzise gelaserten MDF-Platten und wird von 3D-gedruckten Rädern angetrieben.
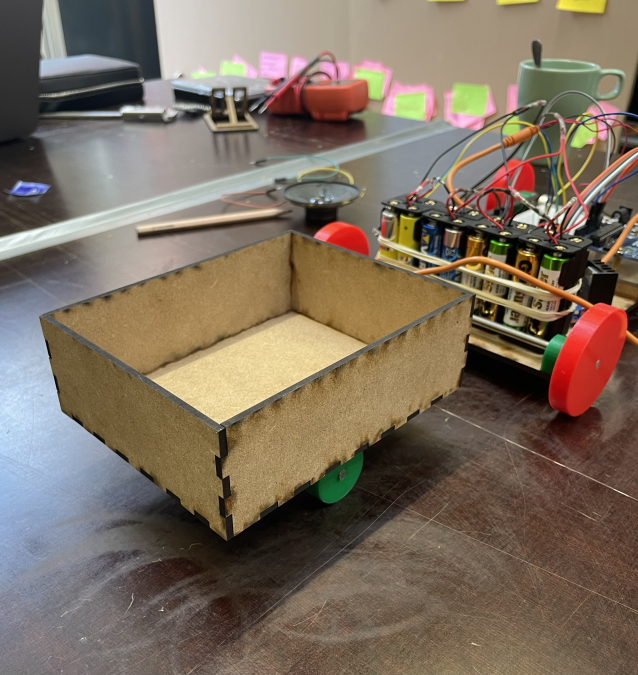
Fahrzeug-Anhänger

Fahrzeug-Anhänger und Anhängerkupplung


In diesem Anhänger wird anschliessend ein Arduino, die LEDs für die Anzeige des CO2-Sensors sowie ein kleiner Bildschirm integriert, der die Umgebungstemperatur anzeigt. Unser CO2 und Temperaturfühler ist ein zuverlässiger Begleiter, um die Umweltauswirkungen in Innenräumen zu verstehen. Er misst nicht nur den Kohlendioxidgehalt in der Luft, sondern gibt auch präzise Informationen zur Raumtemperatur. Diese Daten werden auf einem kleinen Bildschirm in Echtzeit angezeigt, sodass Sie jederzeit über die aktuellen Bedingungen informiert sind. Im Bild ist das Innenleben des Anhängers zu erkennen. Die Schaltung wurde in der Gruppe entwickelt und anschliessend Zusammengelötet.
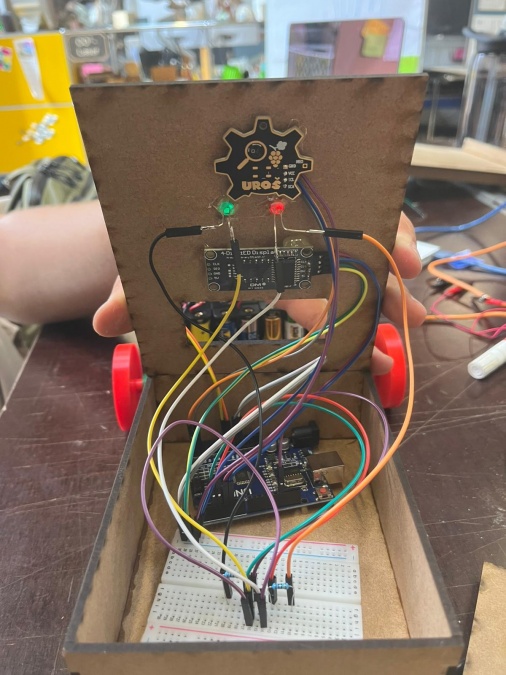
Innenleben des Anhängers

Die Anzeige der CO2-Werte erfolgt über zwei LEDs – grün für gute Luftqualität und rot für schlechte. So können Sie auf einen Blick erkennen, ob es an der Zeit ist, zu lüften oder andere Maßnahmen zur Verbesserung der Luftqualität zu ergreifen. Auf der nächsten Grafik ist die fertige Version abgebildet mit dem Eingebauten Sensor. Ebenfalls ist der Display zu erkennen, auf welchem wechselnd die Temperatur und die aktuelle Luftfeuchtigkeit angezeigt wird.
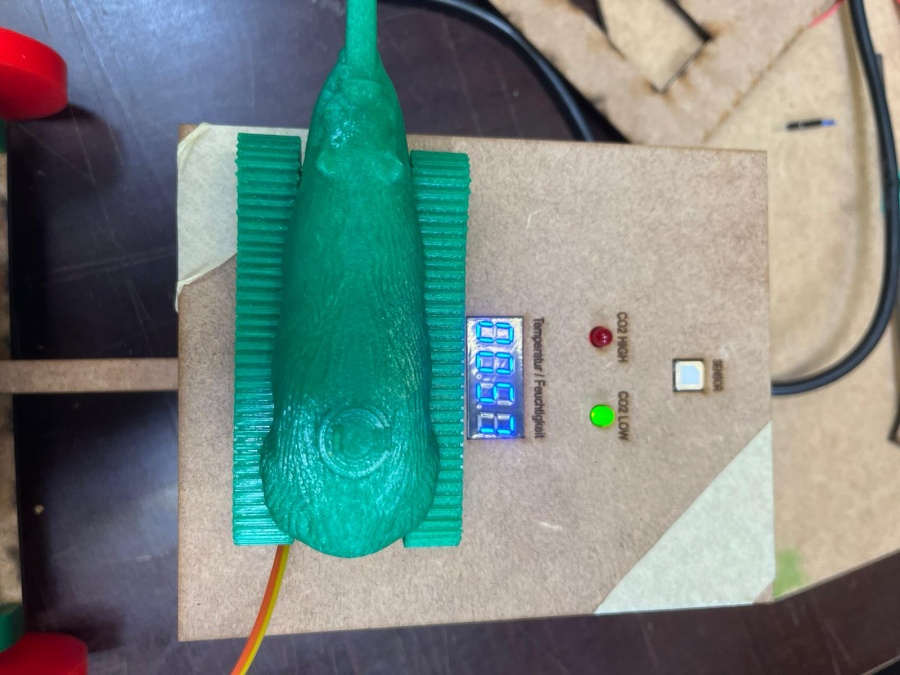
Fahrzeug-Anhänger

Schach ist ein faszinierendes und anspruchsvolles Spiel, das seit Jahrhunderten die menschliche Vorstellungskraft und strategische Denkfähigkeiten herausfordert. Doch was hat Schach mit dem niedlichen Tier Capybara zu tun? Die Verbindung mag auf den ersten Blick ungewöhnlich erscheinen, aber sie führt uns zu einer interessanten Parallele zwischen dem Schachspiel und diesen außergewöhnlichen Nagetieren aus Südamerika.
Genau wie Schachspieler ihr Können, ihre Geduld und ihre strategische Intelligenz einsetzen, um im Spiel zu brillieren, zeigen Capybaras in ihrer natürlichen Umgebung ähnliche Qualitäten. Capybaras sind soziale Tiere, die in Gruppen leben und auf Zusammenarbeit und Schutz angewiesen sind, um in ihrer oft rauen Umgebung zu überleben. Ihre Fähigkeit, sich gegenseitig zu unterstützen und sich vor Gefahren zu schützen, spiegelt die strategische Planung und das Teamwork wider, die im Schachspiel entscheidend sind.
Schach Grundlagen
Nachfolgend werden die wichtigsten Grundlagen des Schach Sports erklärt.
Ziel des Spiels
Das Ziel eines Schachspiels ist es, den gegnerischen König matt zu setzen, was bedeutet, dass der König in eine Position gerät, in der er bedroht ist und nicht mehr auf ein sicheres Feld ziehen kann. Schach ist ein Strategiespiel, bei dem zwei Spieler abwechselnd ihre Figuren bewegen, um den König des Gegners in diese bedrohliche Position zu bringen. Dabei ist es wichtig, die eigenen Figuren zu schützen und gleichzeitig die des Gegners anzugreifen. Das Spiel endet, wenn ein Spieler den gegnerischen König matt setzt, ein Unentschieden (Remis) vereinbart wird oder es zu einem Patt kommt, bei dem keiner der beiden Spieler legal ziehen kann, ohne den eigenen König in Schach zu setzen.
Das Brett
Ein Schachbrett besteht aus 64 quadratischen Feldern, die in 8x8 Reihen und Spalten angeordnet sind. Diese Felder sind abwechselnd schwarz und weiß, wobei jede Reihe und Spalte eine eindeutige Nummer und Buchstabenkennzeichnung hat. Insgesamt gibt es 32 weiße und 32 schwarze Felder. Die Schachfiguren werden zu Beginn des Spiels auf dieses Schachbrett platziert, wobei sich auf jeder Seite 16 Figuren befinden.


Die Figuren
Der Bauer
Der Bauer ist eine Schachfigur, die eine besondere Funktion hat. Er bewegt sich normalerweise ein Feld vorwärts, kann jedoch in seiner ersten Zugmöglichkeit auch zwei Felder vorrücken. Er schlägt andere Figuren diagonal, aber er zieht niemals rückwärts. Die Hauptfunktion des Bauern besteht darin, das Schachbrett zu kontrollieren, das Zentrum zu beeinflussen und sich vorwärts zu bewegen. Die Bauern sind entscheidend für die Eröffnungsphase und können taktische Möglichkeiten im Spiel eröffnen.


Der Läufer
Der Läufer ist eine Schachfigur, die sich diagonal über das Schachbrett bewegen kann. Er kann beliebig viele Felder diagonal vorwärts oder rückwärts ziehen, solange keine anderen Figuren den Weg blockieren. Jeder Spieler hat zwei Läufer, einen auf den weißen Feldern und einen auf den schwarzen Feldern. Die Hauptfunktion des Läufers besteht darin, das Schachbrett in einem schrägen Muster zu kontrollieren und potenzielle Angriffe auf entfernte Ziele zu ermöglichen.


Der Springer
Der Springer ist eine Schachfigur, die sich in einem "L"-förmigen Sprung bewegt. Er zieht zwei Felder gerade in eine Richtung (horizontal oder vertikal) und dann ein Feld im rechten Winkel dazu. Dies ermöglicht dem Springer, andere Figuren zu überspringen, was keine andere Schachfigur kann. Springern ist es möglich, auf ungewöhnliche Weise über das Schachbrett zu navigieren, und sie können in der Lage sein, Gegner auf überraschende Weise anzugreifen oder Verteidigungspositionen einzunehmen.


Der Turm
Der Turm ist eine Schachfigur, die sich horizontal und vertikal über das Schachbrett bewegen kann. Er kann beliebig viele Felder in horizontaler oder vertikaler Richtung ziehen, solange keine anderen Figuren den Weg blockieren. Der Turm hat eine begrenzte Bewegungsfreiheit, da er sich nur in geraden Linien bewegen kann, aber seine Funktion besteht darin, Kontrolle über Reihen und Spalten auf dem Schachbrett zu erlangen, Angriffe durchzuführen und Verteidigungsaufgaben zu übernehmen.


Die Dame
Die Dame ist die mächtigste Schachfigur. Sie kann sich horizontal, vertikal und diagonal über das Schachbrett bewegen, und zwar so viele Felder, wie sie möchte. Dies macht die Dame zu einer vielseitigen und starken Figur, die in der Lage ist, viele Teile des Schachbretts zu kontrollieren, Angriffe durchzuführen und gleichzeitig Verteidigungsaufgaben zu übernehmen. Die Kombination aus horizontalen, vertikalen und diagonalen Bewegungen macht die Dame zu einer herausragenden Bedrohung auf dem Schachbrett.


Der König
er König ist die wichtigste Schachfigur, da das Hauptziel des Spiels darin besteht, ihn zu schützen. Der König kann sich nur ein Feld in jede Richtung bewegen: horizontal, vertikal oder diagonal. Dies bedeutet, dass der König langsam und vorsichtig bewegt werden muss, da er leicht in Gefahr geraten kann. Das Hauptziel ist es, den eigenen König in Sicherheit zu bringen, indem man ihn vor Angriffen des Gegners schützt.


Spezial Züge
Im Schach gibt es einige spezielle Züge und Regeln, die bestimmte Situationen oder taktische Manöver ermöglichen. Hier sind einige der wichtigsten:
Rochade
Die Rochade ist ein spezieller Schachzug, bei dem der König und ein Turm gleichzeitig bewegt werden. Sie ist ein wichtiges taktisches Manöver, das es dem König erlaubt, in eine sicherere Position zu gelangen, während der Turm aktiviert wird. Es gibt zwei Arten der Rochade: die Königsrochade (kurze Rochade) und die Damenschachade (lange Rochade), die in unterschiedliche Richtungen durchgeführt werden. Die Rochade ist besonders nützlich, um den König aus der Mitte des Schachbretts zu bewegen und ihn in Sicherheit zu bringen.

En Passant
En passant ist eine spezielle Schachregel, die es einem Bauer ermöglicht, einen vorbeiziehenden gegnerischen Bauer zu schlagen, als ob dieser nur einen Zug vorwärts gezogen wäre. Dieser Zug ist nur möglich, wenn der vorbeiziehende Bauer zwei Felder vorwärts gezogen wird und das Schlagen durch den ersten Zug des ziehenden Bauern erfolgt. "En passant" ist eine taktische Option, die gelegentlich verwendet wird, um das Schachbrett zu kontrollieren und die Stellung zu verbessern.

Bauernumwandlung
Die Bauernumwandlung ist eine Schachregel, die besagt, dass wenn ein Bauer die gegnerische Grundlinie erreicht, er in eine beliebige andere Schachfigur (normalerweise eine Dame, aber auch Turm, Läufer oder Springer) umgewandelt werden kann. Diese Regel ermöglicht es, die Stärke des Bauern zu erhöhen, da er in eine mächtigere Figur umgewandelt werden kann, um das Spiel fortzusetzen. Die Wahl der umgewandelten Figur hängt von den strategischen Zielen des Spielers ab. Die Bauernumwandlung ist eine wichtige taktische Möglichkeit im Endspiel, um das Spiel zu gewinnen oder ein Patt zu vermeiden.

Schach Partie
Es wurde eine Partie von Mario gegen einen Online-Gegner gezeigt. Die Partie ist als Schnellschachpartie gekennzeichnet und hatte eine maximale Bedenkzeit von 10 Minuten pro Spieler.
Die Partie kann nachgespielt werden unter folgendem Link:
https://www.chess.com/analysis/game/live/88341047045?tab=review
Wichtige Stellungen der Partie
Nachfolgend sind kritische Stellungen aus der Partie aufgelistet.
Die erste kritische Stellung ergab sich bereits nach der Eröffnung. Die gewählte Eröffnung von Schwarz war die Französische Eröffnung. Weiss wählte die Abtauschvariante der Französischen Eröffnung. Nachfolgend ist die Ausgangsstellung und die Stellung nach dem Abtausch der Bauern auf d4 und e6 abgebildet. Danach wurden die Damen getauscht und beide Seiten entwickeln ihre Figuren weiter. Nachdem der Weg für die Rochade frei war haben beide Seiten Rochiert.

Eröffnung

Damengegenüberstellung


Ausgehend von dieser Stellung versuchten beide Seiten anzugreifen. Weiss begann mit einem Angriff am Königsflügel und Schwarz am Damenflügel. Dabei opferte Weiss den Springer gegen einen Bauern und machte damit einen Patzer. Dieser Patzer ist mit den zwei Fragezeichen gekennzeichnet. Danach schlug Schwarz den Springer mit dem Bauern und Weiss schlug mit dem Läufer zurück. Anschliessend probierte Schwarz den Läufer anzugreifen mit seinem Läufer. Dabei leistete sich Weiss einen weiteren Patzer, welcher den Königsflügel stark öffnet.

Patzer 1

Patzer 2


Schwarz tauschte seinen Läufer ab und die a-Linie öffnete sich für den Turm. Dabei fand Schwarz den Besten Zug und platzierte seinen Läufer zentral. Mit diesem Läufer können die Felder d2 und c3 abgedeckt werden, damit der Weisse König nicht herauskommen kann. Weiss kam mit seinem König nach b2, was als ungenauer Zug deklariert wurde. Schwarz fand den besten Zug und damit auch eine Abfolge Weiss in 3 Zügen Schachmatt zu setzen beginnend mit Turm a2. Somit gewann Schwarz die Partie und konnte 9 Elo-Punkte dazugewinnen.

Springerabdeckung

Schachmatt


Reflektion und Learnings
Die DIY-MedTech-Woche, war eine spannende und lehrreiche Erfahrung. Diese Woche hat uns nicht nur technisches Wissen vermittelt, sondern auch unsere Kreativität und Teamarbeit auf die Probe gestellt. Die Idee, ein Fahrzeug zu entwickeln, das durch die Bewegung unserer Augen gesteuert wird, war zunächst herausfordernd. Wir mussten uns intensiv mit der Funktionsweise der Augenmuskeln und ihrer Steuerung auseinandersetzen. Doch nach vielen Experimenten konnten wir ein funktionierendes System entwickeln, das es ermöglichte, das Fahrzeug präzise und intuitiv zu steuern.
Die Woche war jedoch nicht ohne Schwierigkeiten. Es gab Momente der Frustration und des Zweifels, besonders wenn technische Probleme auftraten oder unsere Ideen nicht wie geplant umgesetzt werden konnten. Doch gerade diese Herausforderungen haben uns gezeigt, wie wichtig es ist, Hartnäckigkeit und Problemlösungsfähigkeiten zu entwickeln. Wir mussten uns immer wieder neu motivieren und gemeinsam nach Lösungen suchen. Am Ende der Woche waren wir alle stolz auf das, was wir erreicht hatten. Unser DIY-Fortbewegungsmittel, gesteuert durch Augenmuskeln, war nicht nur ein technischer Erfolg, sondern auch ein Beispiel dafür, wie Medizintechnik und Umweltschutz miteinander verschmelzen können. Diese Woche hat uns gezeigt, dass die Kombination aus Technologie, Kreativität und Umweltbewusstsein zu innovativen Lösungen führen kann.
Insgesamt war die DIY-MedTech-Woche eine intensive Erfahrung, die unsere Fähigkeiten erweitert hat. Sie hat uns gelehrt, dass Medizintechnik nicht nur in Krankenhäusern und Labors existiert, sondern auch in unseren eigenen Händen liegen kann, wenn wir bereit sind, kreativ zu sein und die Herausforderungen anzunehmen.