Difference between revisions of "Alligators"
(→3D Drucken) |
m (Protected "Alligators" ([Edit=Allow only administrators] (expires 09:17, 11 April 2019 (UTC)) [Move=Allow only administrators] (expires 09:17, 11 April 2019 (UTC)))) |
||
| (92 intermediate revisions by 3 users not shown) | |||
| Line 22: | Line 22: | ||
File:Alligator_HSLU1.jpg | '''Ally Gator''' <br />Zoologie | File:Alligator_HSLU1.jpg | '''Ally Gator''' <br />Zoologie | ||
</gallery> | </gallery> | ||
| + | |||
| + | ===Samuel Durrer=== | ||
| + | Ich habe eine Lehre als Automatiker bei der Firma Victorinox absolviert und im Sommer 2014 abgeschlossen. Anschliessend habe ich die technische Berufsmatura in Luzern nachgeholt und studiere nun seit dem Herbst 2016 hier in Horw Maschinentechnik. Voraussichtlich werde ich im Sommer 2020 mein Studium beenden. | ||
| + | |||
| + | ===Manuel Blank=== | ||
| + | Im Jahr 2012 habe ich meine Berufsausbildung als Polymechaniker bei der Firma Ruag Aviation abgeschlossen. Nach einer 1-jährigen Anstellung als Triebwerksmechaniker bei der Firma Ruag Aviation habe ich mich entschlossen die Berufsmaturität nachzuholen. Seit Herbst 2015 absolviere ich ein berufsbegleitendes Studium an der Hochschule Luzern im Studiengang Maschinentechnik. | ||
| + | |||
| + | ===Sascha Kessler=== | ||
| + | Meine Lehre als Zeichner Fachrichtung Ingenieurbau habe ich im Jahr 2015 abgeschlossen. Die technische Berufsmatura habe ich lehrbegleitend absolviert. Seit 2016 studiere ich hier an der Hochschule Luzern Technik & Architektur und bin momentan im 6. und voraussichtlich letzten Semester des Studienfachs Medizintechnik. | ||
==Grundlagen== | ==Grundlagen== | ||
| + | |||
===Do It Yourself=== | ===Do It Yourself=== | ||
| − | Beim Do It Yourself handelt es sich um eine Arbeitsmethode | + | [[File:DIY.jpg|200px|thumb|right|DIY]] |
| + | |||
| + | Beim Do It Yourself handelt es sich um eine Arbeitsmethode, welche man auch als Basteln bezeichnen könnte. Man kann dabei ohne grosses Fachwissen einfach mal ausprobieren und experimentieren. Also einfach einmal selbst machen; sei es Reparieren, Verbessern oder Herstellen. Dabei geht es auch darum seine Erkenntnisse öffentlich zu teilen und von Erfahrungen von anderen zu profitieren. Man kann auch gut bestimmte Projekte von anderen weiterentwickeln, verbessern oder neu entwerfen. | ||
| + | |||
===3D Drucken=== | ===3D Drucken=== | ||
| + | |||
| + | [[File:3d-Drucker.jpg|200px|thumb|right|Ultimaker 2]] | ||
| + | |||
Der 3D-Druck, auch bekannt unter den Bezeichnungen Additive Fertigung, Additive Manufacturing, Generative Fertigung oder Rapid Technologien, ist eine umfassende Bezeichnung für alle Fertigungsverfahren, bei denen Material Schicht für Schicht aufgetragen und so dreidimensionale Gegenstände erzeugt werden. Dabei erfolgt der schichtweise Aufbau computergesteuert aus einem oder mehreren flüssigen oder festen Werkstoffen nach vorgegebenen Maßen und Formen. Beim Aufbau finden physikalische oder chemische Härtungs- oder Schmelzprozesse statt. Typische Werkstoffe für das 3D-Drucken sind Kunststoffe, Kunstharze, Keramiken und Metalle. | Der 3D-Druck, auch bekannt unter den Bezeichnungen Additive Fertigung, Additive Manufacturing, Generative Fertigung oder Rapid Technologien, ist eine umfassende Bezeichnung für alle Fertigungsverfahren, bei denen Material Schicht für Schicht aufgetragen und so dreidimensionale Gegenstände erzeugt werden. Dabei erfolgt der schichtweise Aufbau computergesteuert aus einem oder mehreren flüssigen oder festen Werkstoffen nach vorgegebenen Maßen und Formen. Beim Aufbau finden physikalische oder chemische Härtungs- oder Schmelzprozesse statt. Typische Werkstoffe für das 3D-Drucken sind Kunststoffe, Kunstharze, Keramiken und Metalle. | ||
| + | |||
3D-Drucker werden in der Industrie, im Modellbau und der Forschung eingesetzt zur schnellen und kostengünstigen Fertigung von Modellen, Mustern, Prototypen, Werkzeugen und Endprodukten. Daneben gibt es Anwendungen im Heim- und Unterhaltungsbereich sowie in der Kunst. | 3D-Drucker werden in der Industrie, im Modellbau und der Forschung eingesetzt zur schnellen und kostengünstigen Fertigung von Modellen, Mustern, Prototypen, Werkzeugen und Endprodukten. Daneben gibt es Anwendungen im Heim- und Unterhaltungsbereich sowie in der Kunst. | ||
| + | |||
Auch wir haben in dieser Woche den 3D-Drucker verwendet um kostengünstig und schnell Prototypen zu bauen. Da wir bereits gute Grundkenntnisse im 3D-Druck hatten und die Unterstützung durchs FabLab gross war, hatten wir wenig Probleme unserer Prototypen herzustellen. Das einzige was uns Probleme bereitet hat, war die Masshaltigkeit der gedruckten teile. Da jeder Drucker etwas andere Eigenschaften hat, mussten wir uns zuerst mit den Druckern vertraut machen. Um sicher zu gehen das man die gedruckten Teile ohne Nachbearbeitung verwenden kann, sollte man einen Millimeter vom exakten Mass Zugabe lassen. | Auch wir haben in dieser Woche den 3D-Drucker verwendet um kostengünstig und schnell Prototypen zu bauen. Da wir bereits gute Grundkenntnisse im 3D-Druck hatten und die Unterstützung durchs FabLab gross war, hatten wir wenig Probleme unserer Prototypen herzustellen. Das einzige was uns Probleme bereitet hat, war die Masshaltigkeit der gedruckten teile. Da jeder Drucker etwas andere Eigenschaften hat, mussten wir uns zuerst mit den Druckern vertraut machen. Um sicher zu gehen das man die gedruckten Teile ohne Nachbearbeitung verwenden kann, sollte man einen Millimeter vom exakten Mass Zugabe lassen. | ||
| − | |||
===LaserCutter=== | ===LaserCutter=== | ||
| + | |||
| + | [[File:Laser-Cutter.jpg|200px|thumb|right|Laser-Cutter]] | ||
Mit Hilfe des Lasercuters haben wir das Gehäuse unseres Infusionsalligators aus MDF-Platten gelasert. Dies funktionierte sehr gut und ohne weiteren Komplikationen. | Mit Hilfe des Lasercuters haben wir das Gehäuse unseres Infusionsalligators aus MDF-Platten gelasert. Dies funktionierte sehr gut und ohne weiteren Komplikationen. | ||
| + | Mit dem Laser-Cutter AKJ-6090 von Acctek, welcher im FabLab steht, kann man Flächen von 900x600 mm bearbeiten. Der 100 Watt Laser kann diverse Materialien Gravieren und ausschneiden. Die Materialien reichen von Plexiglas über Kunststoffe und Holz bis hin zu Karton, Leder oder Textilstoffe. Es kann Acrylglas bis zu einer Dicke von ca. 8 mm und Holz bis zu einer Dicke von 6 mm geschnitten werden. Aluminium kann graviert werden, jedoch nicht geschnitten. | ||
| + | |||
| + | |||
| + | ===SkillShare=== | ||
| + | |||
| + | Bei den SkillShare-Sessions ging es darum, vorhandenes Wissen zu Teilen und vom existierenden Wissen der Mitstudierenden zu profitieren. Man konnte zu Beginn der Woche auf rote Zettel Themen aufschreiben über die man gerne mehr erfahren oder lernen möchten. Zusätzlich konnte man auf Blaue Zettel seine "Skills" aufschreiben, worin man selbst stark ist. Anschliessend wurde eine Auswahl an Themen getroffen welche am meisten aufgeschrieben wurden. Jede Gruppe musste dann im verlauf der Woche eine SkillShare-Session durchführen und jeder Student musste mindestens 2 Sessions besuchen. Somit konnte bestehendes Wissen gut geteilt werden. | ||
| + | |||
===Arduino=== | ===Arduino=== | ||
| − | + | [[File:Arduino.jpg|200px|thumb|right|Arduino]] | |
| − | + | Das Arduiono ist eine open Source Hardware und Software. Bei der Hardware handelt es sich um ein elektronik Board mit Mikrocontroller und diversen Ein- und Ausgängen. Die Programmiersprache basiert auf Processing und ist ähnlich zu Programmieren wie C oder C++. Für unser Projekt haben wir das Arduino verwendet um zwei Servomotoren anzusteuern und LEDs leuchten zu lassen. Mit Hilfe des Mussel SpickeShield haben wir die Muskelkontraktionen gemessen und im Arduino eingelesen und verwendet um die Motoren anzusteuern. | |
| − | + | Das Arduino hat eine USB-Schnittstelle um den Code vom PC auf den Mikrocontroller zu laden. Zusätzlich verfügt das Arduino über eine separaten Stromanschluss um das Board zu speisen. Mit Hilfe des Arduinos könne diverse Analoge und Digitale Signale eingelesen werden. Zusätzlich können diverse Aktoren angesteuert werden, wie zum Beispiel DC-Motoren, Servo-Motoren und sogar Schrittmotoren. | |
==Experimente== | ==Experimente== | ||
===Muscle SpikerShield=== | ===Muscle SpikerShield=== | ||
| + | |||
| + | [[File:Foto 12.02.18, 16 13 59.jpg|400px|thumb|right|Muscle SpikerShield]] | ||
| + | |||
Das Muscle SpikerShield wurde als Bausatz abgegeben und einmal fertig zusammengebaut. Die Bauanleitung dazu wird auf der Webseite https://backyardbrains.com/products/diyMuscleSpikerShield zur Verfügung gestellt. | Das Muscle SpikerShield wurde als Bausatz abgegeben und einmal fertig zusammengebaut. Die Bauanleitung dazu wird auf der Webseite https://backyardbrains.com/products/diyMuscleSpikerShield zur Verfügung gestellt. | ||
| Line 63: | Line 92: | ||
In diesem Experiment wurde das Kit zusammengebaut. Danach konnten die Elektroden auf einem Muskel platziert werden. Eine Referenzelektrode wurde irgendwo sonst auf dem Körper platziert. Mit dem zur Verfügung gestellten Code, konnte zusammen mit einem Arduino Uno das Signal des entsprechenden Muskels ausgewertet werden. Es zeigte sich als aufleuchtende LEDs, anhand der stärke der Kontraktion. Das Signal konnte auch als Diagramm dargestellt werden. | In diesem Experiment wurde das Kit zusammengebaut. Danach konnten die Elektroden auf einem Muskel platziert werden. Eine Referenzelektrode wurde irgendwo sonst auf dem Körper platziert. Mit dem zur Verfügung gestellten Code, konnte zusammen mit einem Arduino Uno das Signal des entsprechenden Muskels ausgewertet werden. Es zeigte sich als aufleuchtende LEDs, anhand der stärke der Kontraktion. Das Signal konnte auch als Diagramm dargestellt werden. | ||
Dieses Experiment bildet die Grundlage, um eine Schaltung oder Steuerung zu erstellen, die über Muskeln funktionieren kann. | Dieses Experiment bildet die Grundlage, um eine Schaltung oder Steuerung zu erstellen, die über Muskeln funktionieren kann. | ||
| − | |||
===Heart and Brain SpikerShield=== | ===Heart and Brain SpikerShield=== | ||
| Line 80: | Line 108: | ||
Arduino-Code: | Arduino-Code: | ||
[[#Servo]] | [[#Servo]] | ||
| + | |||
| + | {{#widget:Iframe | ||
| + | |url=https://www.youtube.com/embed/R-rsOBRjvbo | ||
| + | |width=238*2 | ||
| + | |height=178*2 | ||
| + | |border=0 | ||
| + | }} | ||
'''Probleme''' | '''Probleme''' | ||
| Line 85: | Line 120: | ||
Viele Gruppen hatten Probleme, einen Servo anzusteuern. Bei uns hat es komischerweise auf Anhieb funktioniert. Aufgrund mangelndem Wissen konnte aber keiner genau sagen, warum es genau bei uns funktionierte. Später hat sich herausgestellt, dass ein Servo mit der Signalleitung auf einen PWM-Pin gesteckt werden muss, den wir zufälligerweise getroffen haben. Auf dem Arduino Uno sind nur bestimmte Pins sogenannte PWM-Pins. Ein weiteres Problem war, dass gewisse Pins vom SpikerShield selbst gebraucht wurden und so der Servo gar nichts oder irgendetwas unerwartetes gemacht hat. | Viele Gruppen hatten Probleme, einen Servo anzusteuern. Bei uns hat es komischerweise auf Anhieb funktioniert. Aufgrund mangelndem Wissen konnte aber keiner genau sagen, warum es genau bei uns funktionierte. Später hat sich herausgestellt, dass ein Servo mit der Signalleitung auf einen PWM-Pin gesteckt werden muss, den wir zufälligerweise getroffen haben. Auf dem Arduino Uno sind nur bestimmte Pins sogenannte PWM-Pins. Ein weiteres Problem war, dass gewisse Pins vom SpikerShield selbst gebraucht wurden und so der Servo gar nichts oder irgendetwas unerwartetes gemacht hat. | ||
| − | === | + | ==Unser Prototyp== |
| + | ====Einführung==== | ||
| + | Neben den verschiedenen Experimenten, wurde im Rahmen dieser Blockwoche Medizintechnik DIY eine kleine Projektarbeit (Prototype) mit Bezug zur Medizintechnik durchgeführt. Das Ziel dieses Projekt ist die Anwendung von erlangtem Wissen, sowie eine Erweiterungen des Medizin-technischen Horizonts. | ||
| + | |||
| + | [[File:Infusionsständer.png|thumb|100px|right|Infusionsständer]]Das Ziel unserer Projektarbeit ist, den Infusionsständer zu überarbeiten. Durch den Infusionsständer sind die täglichen Spaziergänge stark eingeschränkt, Spaziergänge über Wiesen oder Schotterwege sind gänzlich ausgeschlossen. Mit dem im Team eigens entwickelten Prototype dem „Infusions-Alligator“ werden unabhängige Spaziergänge auf jeglichem Terrain ermöglicht. Treppen, sowie holprige Unterlagen stellen für den "Infusions-Alligator" keine Probleme dar. Die Unabhängigkeit wird durch einen ergonomisch geformten Rucksack ermöglicht. In diesem Rucksack befindet sich der Mechanismus, welche die Versorgung von Schmerzmitteln oder Kochsalzlösungen sicherstellt. Die Menge des Schmerzmittels ist bequem über die Muskelkraft in der Hand steuerbar. | ||
| − | == | + | ====Realisierung mechanischer Komponenten Infusions-Alligator==== |
| − | + | Eine mechanische Konstruktion einer Pumpe ermöglicht das Fördern des Schmerzmittels. Ein bestandteil der Pumpe sind die Zahnstangen und Zahnräder. Die Auslegung dieser Komponenten erfolgte mittels der Software Kisssoft. Mit Berücksichtigung der gültigen Normen DIN, ISO und AGMA gewährleistet die Software Kisssoft einfache Auslegungen, Nachrechnungen und Festigkeitsberechnungen von Zahnräder, sowie weiteren Getriebe-Komponenten in verschiedenen Arten von Materialien. Einführungen und Tutorials in die Software Kisssoft finden sie unter folgendem Link: <br> | |
| + | https://www.kisssoft.ch/deutsch/downloads/instructions_kisssoft.php<br> | ||
| + | |||
| + | <gallery mode="packed-hover" widths=320px heights=200px> | ||
| + | File:Zahnstange_Zahnrad.png|Auslegung Zahnstangen und Zahnräder mittels Kisssoft | ||
| + | </gallery> | ||
| + | |||
| + | Anschließend erfolgte die Implementierung der Getriebekomponenten in die CAD-Software NX von Siemens. Für die optimale Platzierung der beiden Servomotoren erfolgte das konstruieren einer Einheit im CAD. Die verschiedenen Komponenten haben wir mittels einem adaptiven Fertigungsverfahren dem 3D-Drucken hergestellt. Für eine optimale Abschirmung der technischen Komponenten dient ein Gehäuse aus NDF-Platten. Das Gehäuse wurde wiederum in der CAD-Software NX gezeichnet und anschließend mit dem Laser-Cutter aus NDF-Platten ausgeschnitten. Zu berücksichtigen gilt es, dass beim designen von Laser-Cutter Bauteile keine Anpassung der Fertigungstoleranzen in der Zeichnung der Spaltmasse notwendig sind. | ||
| + | <gallery mode="packed-hover" widths=320px heights=200px> | ||
| + | File:Pumpe_CAD.png|CAD-Modell | ||
| + | File:Pumpe_mit_Gehäuse.png|CAD-Modell inklusive Gehäuse | ||
| + | File:Pumpe.jpg|3D-Druck | ||
| + | File:Gehäusejpg.jpg|Gehäuse aus NDF-Platten | ||
| + | </gallery> | ||
| + | |||
| + | ====Montage der Komponenten==== | ||
| + | Zur Realisierung der Pumpe wurde das Getriebe direkt mit zwei Spritzen verbunden, dadurch wird das Fördern vom Schmerzmittel sichergestellt. Das Steuern der Servomotoren erfolgt mittels dem Muscle Spiker Shield. Die Stromversorgung wird durch einen Akkumulator ermöglicht. Zur Visualisierung des Schmerzmittelfüllstands wurden zusätzlich sechs LED’s eingebaut. Die ganze Einheit wird mit zwei Arduino Uno‘s gesteuert, der Code ist im Kapitel Anhang ersichtlich. Zudem gewährleistet ein ergonomischer Nierengurt bequemes Tragen des "Infusions-Alligators". | ||
| + | <gallery mode="packed-hover" widths=320px heights=200px> | ||
| + | File:Montage_der_Komponenten.jpg|Montage der Komponenten | ||
| + | File:Löten_der_Stromversorgung.jpg|Löten der Stromversorgung | ||
| + | File:Gehäuse_mit_Komponenten.jpg|Gehäuse mit Komponenten | ||
| + | File:Infusions_Alligator.jpg|Infusions-Alligator | ||
| + | </gallery> | ||
| + | |||
| + | ====Prototype Infusions-Alligator==== | ||
| + | Der Infusions-Alligator erhöht die Lebensqualität von Menschen, welche auf eine intravenöse Zufuhr von Schmerzmittel angewiesen sind. Dieser Rucksack ermöglicht Spaziergänge in jeglichem Terrain. Die Schmerzmittel Zufuhr lässt sich bequem durch das Ballen der Faust steuern. Zur Überwachung des Schmerzmittelfüllstand sind am "Infusions-Alligator" sechs in verschieden Farben leuchtenden LED’s angebracht. Das folgende Video gibt einen Einblick wie der "Infusions-Alligator" funktioniert. | ||
| + | |||
| + | {{#widget:Iframe | ||
| + | |url=https://www.youtube.com/embed/v21WW2z4jrU | ||
| + | |width=238*2 | ||
| + | |height=178*2 | ||
| + | |border=0 | ||
| + | }} | ||
| + | {{#widget:Iframe | ||
| + | |url=https://www.youtube.com/embed/JzHhtTK4b4k | ||
| + | |width=238*2 | ||
| + | |height=178*2 | ||
| + | |border=0}}<br /> | ||
| + | '''Infusions-Alligator'''<br /> | ||
==Arbeitsjournal== | ==Arbeitsjournal== | ||
| Line 123: | Line 200: | ||
'''FabLab'''<br /> | '''FabLab'''<br /> | ||
http://fablab-luzern.ch/info/fab-charta-2/#FabCharter<br /> | http://fablab-luzern.ch/info/fab-charta-2/#FabCharter<br /> | ||
| + | <br /> | ||
'''Biotechnologie für Alle'''<br /> | '''Biotechnologie für Alle'''<br /> | ||
| + | Biotechnologie findet nicht mehr nur in speziell ausgerüsteten Labors statt. Bastler aus allen Fachbereichen bringen die Labortechnologie in Küchen, Bäder, Keller oder sonstige Labors der "Marke Eigenbau". 2008 begann in Boston die Verschiebung von Biotechnologischer Forschung von etablierten Institutionen in die Küchen und Garagen von Bastlern und Technik-Freaks. Seither gibt es einen deutlichen Trend rund um den Globus, wo sich Menschen ihre eigenen Laborgeräte bauen und ihre Entwicklungen mit der Welt teilen. | ||
| + | |||
https://www.hackteria.org/wiki/images/a/ac/SATW_INFO_2-15_DIY-Bio_DE.pdf<br /> | https://www.hackteria.org/wiki/images/a/ac/SATW_INFO_2-15_DIY-Bio_DE.pdf<br /> | ||
| + | <br /> | ||
'''Interview in "The Art of Free and Open Science", MCD#68'''<br /> | '''Interview in "The Art of Free and Open Science", MCD#68'''<br /> | ||
| + | Im Interview erzählt Kursleiter Marc Dusseiller über die Entwicklung von Hackteria. Hackteria soll professionelle Laborpraktiken und DIYbio zusammenbringen. Im Gegensatz zu einem komplett eingerichteten Labor tüftelten sie an einem mobilen Labor, das überallhin transportiert und aufgestellt werden kann. | ||
| + | |||
https://www.hackteria.org/wordpress/wp-content/uploads/2012/10/hackteria_interview_MCD68.pdf<br /> | https://www.hackteria.org/wordpress/wp-content/uploads/2012/10/hackteria_interview_MCD68.pdf<br /> | ||
===Videos=== | ===Videos=== | ||
'''How to control someone else's arm with your brain | Greg Gage'''<br /> | '''How to control someone else's arm with your brain | Greg Gage'''<br /> | ||
| + | Das Video handelt von Greg Gage, der in einem Ted Talk über das Gehirn berichtet. Das Gehirn fasziniert ihn und er findet es Schade, dass der Aufbau und die Funktion zu wenig Bekanntheit hat. Deshalb will er Neurowissenschaften günstig und anschaulich zeigen. Im Video demonstriert er eine SpikerBox, die elektrische Impulse des Nervensystems aufzeichnen kann. Zwei Personen erhalten zwei Elektroden am Arm und eine auf der Hand. Wenn nun die erste Person ihren Arm anspannt, erkennt dies das Gerät, und sendet einen elektrischen Impuls an die zweite Person. Das führt zur unwillkürlichen Kontraktion des Muskels der zweiten Person.<br /> | ||
{{#widget:Iframe | {{#widget:Iframe | ||
|url=https://www.youtube.com/embed/rSQNi5sAwuc | |url=https://www.youtube.com/embed/rSQNi5sAwuc | ||
| Line 144: | Line 228: | ||
}}<br /> | }}<br /> | ||
'''"Simplicity: We know it when we see it" | George Whitesides'''<br /> | '''"Simplicity: We know it when we see it" | George Whitesides'''<br /> | ||
| + | George Whitesides versucht im Video zu erklären was Einfachheit der Dinge heisst. Im ersten Moment klingt das banal, doch wenn man sich das genauer überlegt, ist die Frage alles andere als "einfach" beantwortet.<br /> | ||
{{#widget:Iframe | {{#widget:Iframe | ||
|url=https://www.youtube.com/embed/GayY-mjZXrQ | |url=https://www.youtube.com/embed/GayY-mjZXrQ | ||
| Line 151: | Line 236: | ||
}}<br /> | }}<br /> | ||
'''"Why toys make good medical devices | Jose Gomez-Marquez'''<br /> | '''"Why toys make good medical devices | Jose Gomez-Marquez'''<br /> | ||
| + | Jose Gomez-Marquez lässt sich von Kinderspielzeug inspirieren, um neue medizintechnische Geräte zu entwickeln. Er findet vor allem die Supply-Chain von Spielzeug interessant. Das heisst es ist überall auf der Welt anzutreffen. Er schaut sich besonders an, wie Teile zusammengefügt sind oder welche Bauteile er entnehmen kann. Spielzeug wurde aufwändig Entwickelt, was er ausnutzen will, um die Inventionen zu "hacken"<br /> | ||
{{#widget:Iframe | {{#widget:Iframe | ||
|url=https://www.youtube.com/embed/UHCT9SOBHs0 | |url=https://www.youtube.com/embed/UHCT9SOBHs0 | ||
| Line 158: | Line 244: | ||
}}<br /> | }}<br /> | ||
'''SENI GOTONG ROYONG: HackteriaLab 2014 - Yogyakarta'''<br /> | '''SENI GOTONG ROYONG: HackteriaLab 2014 - Yogyakarta'''<br /> | ||
| + | HackteriaLab 2014 - Yogyakarta ist ein zweiwöchiges Treffen von Forschern, Künstlern, Wissenschaftlern, ... in der Universitätsstadt Yogyakarta. Als Web-Community ist das Ziel von Hackteria, Hacker zu ermutigen, zu "basteln", tüfteln, zusammenzuarbeiten und ihr Wissen zu Teilen.<br /> | ||
{{#widget:Iframe | {{#widget:Iframe | ||
|url=https://www.youtube.com/embed/_CqTzpS7yl8 | |url=https://www.youtube.com/embed/_CqTzpS7yl8 | ||
| Line 165: | Line 252: | ||
}}<br /> | }}<br /> | ||
'''Open Source Estrogen: Housewives Making Drugs - Mary Maggic'''<br /> | '''Open Source Estrogen: Housewives Making Drugs - Mary Maggic'''<br /> | ||
| + | Ziel dieses Projektes ist es, ein Open Source Protokoll für die Östrogensynthese zu entwickeln. Als Reaktion auf die verschiedenen Biopolitiken der hormonellen Steuerung von weiblichen Körpern, die von Regierungen und Institutionen vorgeschrieben werden, zielt das Projekt darauf ab, DIY-Protokolle zur Emanzipation des Östrogen-Biomoleküls zu entwickeln.<br /> | ||
{{#widget:Iframe | {{#widget:Iframe | ||
|url=https://www.youtube.com/embed/38nwrf-h52I | |url=https://www.youtube.com/embed/38nwrf-h52I | ||
| Line 176: | Line 264: | ||
Zum Hauptartikel: [[DIY-MedTech Löten - Team Alligators]] | Zum Hauptartikel: [[DIY-MedTech Löten - Team Alligators]] | ||
| − | + | ====Ziel des Kurses==== | |
| − | + | Die Grundlagen des Lötens kennen und verstehen. In der Lage sein einfache Print-Platte zu Löten, sowie die Lötstelle auf | |
| + | Korrektheit zu beurteilen. Ein weitere Meilenstein ist das Erlangen der Grundkenntnisse des Entlöten einer fehlerhaften Lötstelle. | ||
| + | |||
| + | ====Grundlagen und Definition von Löten==== | ||
| + | Löten ist ein stoffschlüssiges Fügen und Beschichten von Werkstoffen mithilfe eines geschmolzenen Zusatzmetalls, dem Lot. Die Grundwerkstoffe werden vom Lot benetzt, ohne geschmolzen zu werden. | ||
| + | Durch das Löten enstehen unlösbare, stoffschlüssige Verbindungen, die fest, dicht und leitfähig sind, wobei bei diesem Kurs die leitfähigkeit im Vordergrund stehen. Beim Löten werden grundsätzlich drei verschieden Lötverfahren unterschieden, das Weichlöten, das Hartlöten und das Hochtemperaturlöten siehe Kapitel Lötverfahren. | ||
| + | |||
| + | ====Lötverfahren==== | ||
| + | Beim '''Weichlöten''' liegt die Arbeitstemperatur die Arbeitstemperatur '''unter 450°C'''. Das Weichlöten wendet man an, wenn dichte oder leitfähige Verbindungen erforderlich sind und an die Belastbarkeit keine hohen Ansprüche gestellt werden oder wenn die zu lötenden Bauteile wärmeempfindlich sind. Das Löten von elektronischen Bauteilen, was der Inhalt zu diesem Kurs bildet, gehört zu den gängigsten Verfahren des Weichlötens. Die Funktionsweise und Anwendungen sind im Kapitel Löten elektronischer Bauteile beschrieben. | ||
| + | |||
| + | Beim '''Hartlöten''' liegt die Arbeitstemperatur '''über 450°C'''. Hartlötverbindungen weisen gegenüber Weichlötverbindung grössere Festigkeit auf als Weichlöten, aber geringere als Weichlötverbindungen auf. Hartlötverbindungen sind ebenfalls bei entsprechenden Einsatz vom Lot leitfähig für Wärme und Strom. Häufig verwendete Werkstoffe für Hartlöten sind Stahl, Kupfer und Messing. | ||
| + | [[File:Löten_skill_share1.jpg|thumb|200px|left|Hartlöten]] | ||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | '''Hochtemperaturlöten''' ist ein Löten unter Schutzgas oder im Vakum mit Loten, deren Arbeitstemperaturen '''über 900°C''' liegt. | ||
| + | |||
| + | ====Löten elektronischer Bauteile==== | ||
| + | [[File:Lötstation.jpg|thumb|150px|right|Lötstation]] | ||
| + | Das gängigste Verfahren ist das Löten mittels von Lötstationen. Die Lötstationen erlauben einen universellen Einsatz des Lötwerkzeugs, da hier die Lötspitzentemperatur in weiten Grenzen sehr genau und stabil einstellbar ist. Der Arbeitstemperaturbereich liegt zwischen 180-350°C. Beim im Kurs verwendeten Lötzinn vom Typ Sn99Cu1+ML liegt die ideale Löttemperatur bei ca. 300 °C. Grundsätzlich gilt es dabei zu beachten, dass die Löttemperatur über der Schmelztemperatur des Lots liegt, jedoch sollten zu hohe Löttemperaturen verminden werden, da dadurch ein starkes Überhitzen der elektronischen Bauteile resultieren kann. | ||
| + | |||
| + | ====Schrittweise Anleitung für erfolgreiches Löten==== | ||
| + | 1. Um zwei Metalle zu verlöten werden sie an der Lötstelle auf die richtige Arbeitstemperatur gebracht. Dazu wird das Lötgerät verwendet. Hat die Lötspitze des Lötgerätes die richtige Temperatur, dann dauert das ca. 2 bis 3 Sekunden. | ||
| + | |||
| + | 2. Danach wird das Lötzinn kurz hinzugeführt (ca. 1 bis 3 Sekunden). Das Lötzinn beginnt im Optimalfall zwischen die Metalle zu fließen. Dabei steigt ein kleiner Rauchfaden auf und es knistert etwas an der Lötstelle. Je nach Größe der Lötstelle dauert das zwischen 2 bis 5 Sekunden. Sauber fließendes Lötzinn glänzt silbrig. Hat sich das Zinn verteilt, wird das Lötgerät entfernt. | ||
| + | |||
| + | 3. Danach kühlt die Lötstelle ab. Haben die Metalle eine mechanische Verbindung und werden keiner Erschütterung (Verwackeln, Zittern) ausgesetzt glänzt die Lötstelle silbrig. Falls die Lötstelle nicht den Anforderungen entspricht kann diese mit entlöten entfernt werden. | ||
| − | + | 4. Überflüssiges Lötzinn an der Lötspitze sollte umgehend mittels eines nassen Schwammes entfernt werden | |
| − | + | ====Entlöten von Lötstellen==== | |
| + | Falls ein Bauteil fälschlicherweise nicht korrekt platziert ist oder die Lötstelle ungenügend ist, gibt es die Möglichkeit die Lötstelle zu entlöten. Meistens reicht ein erneutes erhitzen der Lötstelle aus, sodass die Bauteile durch herausziehen entfernt werden können. Ist dies nicht der Fall lassen sich Lötstellen nur mit viel Mühe und Aufwand wieder entfernen. Grundsätzlich gibt es zwei verschiedene Verfahren zum Entlöten, mittels einer '''Lötlitze''' oder einer '''Lötpumpe'''. | ||
| − | + | Entötlitze | |
| + | Die Entlötlitze ist ein feines Drahtgeflecht aus Kupfer, das in erhitztem Zustand Lötzinn aufsaugt. Dazu muss sich die Entlötlitze zwischen Lötstelle und Lötspitze befinden. Das Entlöten mit der Entlötlitze entfernt das Lötzinn nahezu rückstandfrei. | ||
| − | === | + | Entlötpumpe |
| + | Das zweite Hilfsmittel ist die Entlötpumpe. Sie wird durch Druck gespannt, auf die erhitzte und flüssige Lötstelle aufgesetzt und ausgelöst. Sie erzeugt einen kurzzeitigen Staubsaugereffekt, bei dem sie das heiße und flüssige Lötzinn nach oben in sich hineinzieht. Die Lötstelle ist dann mit einem leichten Zinn-Rückstand frei gelegt. Die Kontaktstellen lassen sich im Regelfall voneinander lösen. Doch Vorsicht, beim Betätigen der Entlötpumpe entsteht ein Rückstoß, der die Leiterplatte beschädigen kann. Deshalb ist mit der Entlötpumpe vorsichtig umzugehen. | ||
| + | <gallery mode="packed-hover" widths=320px heights=200px> | ||
| + | File:Entlöten_mittels_Lötlitze.jpg|Entlöten mittels Entlötlitze | ||
| + | File:Entlötpumpe.jpg|Entlötpumpe | ||
| + | </gallery> | ||
| − | + | Soldering is easy<br> | |
| + | https://mightyohm.com/files/soldercomic/FullSolderComic_EN.pdf<br> | ||
==Learnings== | ==Learnings== | ||
Latest revision as of 12:17, 11 March 2019

Contents
Einleitung
Im Rahmen der Blockwoche Medizintechnik DIY wurde das Projektteam Alligators gegründet. Die Blockwoche wurde vom 11. bis 16. Februar 2019 an der Hochschule Luzern Technik & Architektur durchgeführt. Innerhalb des Kurses vermittelte man den Studierenden die Do it yourself Kultur, sowie kreatives Arbeiten in interdisziplinären Gruppen. Ziel ist es, dass die Studierenden in der Lage sind, eigene Projektideen an der Schnittstelle von Technik und Medizin umzusetzen und digitale Fabrikationsmethoden für Prototypen kennen lernen und anwenden. Die Woche findet im FabLab, sowie weiteren Unterrichtsräumlichkeiten der Hochschule Luzern Technik & Architektur statt. Durch die Verbindung von Medizintechnik mit Do It Yourself Ansätzen, soll das Verständnis von medizintechnischen Geräten gefördert werden. Die Studierenden sollen sich, durch gegenseitiges Teilen von Vorkenntnissen und Erkenntnissen, selbständig Zugang zu neuem Wissen verschaffen. Während der Woche finden deshalb, nebst dem selbständigen Experimentieren und Prototypenbau, regelmässig Skill Share Sessions statt. Dort können Fähigkeiten unter den Studierenden ausgetauscht werden. Die Blockwoche fand die ganze Woche statt, täglich von 8:30 - 16.30 Uhr und am Samstag von 9:00 - 14:00 Uhr. Der definitive Wochenplan sah dann so aus:

Gruppenmitglieder
Hallo zusammen, wir sind das Team Alligators der Blockwoche Medizintechnik Do It Yourself. Der Kern des Projektteams besteht aus drei Studenten, zwei vom Studiengang Maschinentechnik und einer vom Studiengang Medizintechnik. Durch die interdisziplinäre Zusammensetzung wird die praktische und theoretische Arbeit im Team gefördert, womit zusätzlich wesentliche Erfahrungen von weiteren Fachgebieten gewonnen werden können.
Mitglieder:

Samuel Durrer Maschinenbau

Manuel Blank Maschinenbau

Sascha Kessler Medizintechnik

Ally Gator
Zoologie




Samuel Durrer
Ich habe eine Lehre als Automatiker bei der Firma Victorinox absolviert und im Sommer 2014 abgeschlossen. Anschliessend habe ich die technische Berufsmatura in Luzern nachgeholt und studiere nun seit dem Herbst 2016 hier in Horw Maschinentechnik. Voraussichtlich werde ich im Sommer 2020 mein Studium beenden.
Manuel Blank
Im Jahr 2012 habe ich meine Berufsausbildung als Polymechaniker bei der Firma Ruag Aviation abgeschlossen. Nach einer 1-jährigen Anstellung als Triebwerksmechaniker bei der Firma Ruag Aviation habe ich mich entschlossen die Berufsmaturität nachzuholen. Seit Herbst 2015 absolviere ich ein berufsbegleitendes Studium an der Hochschule Luzern im Studiengang Maschinentechnik.
Sascha Kessler
Meine Lehre als Zeichner Fachrichtung Ingenieurbau habe ich im Jahr 2015 abgeschlossen. Die technische Berufsmatura habe ich lehrbegleitend absolviert. Seit 2016 studiere ich hier an der Hochschule Luzern Technik & Architektur und bin momentan im 6. und voraussichtlich letzten Semester des Studienfachs Medizintechnik.
Grundlagen
Do It Yourself

Beim Do It Yourself handelt es sich um eine Arbeitsmethode, welche man auch als Basteln bezeichnen könnte. Man kann dabei ohne grosses Fachwissen einfach mal ausprobieren und experimentieren. Also einfach einmal selbst machen; sei es Reparieren, Verbessern oder Herstellen. Dabei geht es auch darum seine Erkenntnisse öffentlich zu teilen und von Erfahrungen von anderen zu profitieren. Man kann auch gut bestimmte Projekte von anderen weiterentwickeln, verbessern oder neu entwerfen.
3D Drucken

Der 3D-Druck, auch bekannt unter den Bezeichnungen Additive Fertigung, Additive Manufacturing, Generative Fertigung oder Rapid Technologien, ist eine umfassende Bezeichnung für alle Fertigungsverfahren, bei denen Material Schicht für Schicht aufgetragen und so dreidimensionale Gegenstände erzeugt werden. Dabei erfolgt der schichtweise Aufbau computergesteuert aus einem oder mehreren flüssigen oder festen Werkstoffen nach vorgegebenen Maßen und Formen. Beim Aufbau finden physikalische oder chemische Härtungs- oder Schmelzprozesse statt. Typische Werkstoffe für das 3D-Drucken sind Kunststoffe, Kunstharze, Keramiken und Metalle.
3D-Drucker werden in der Industrie, im Modellbau und der Forschung eingesetzt zur schnellen und kostengünstigen Fertigung von Modellen, Mustern, Prototypen, Werkzeugen und Endprodukten. Daneben gibt es Anwendungen im Heim- und Unterhaltungsbereich sowie in der Kunst.
Auch wir haben in dieser Woche den 3D-Drucker verwendet um kostengünstig und schnell Prototypen zu bauen. Da wir bereits gute Grundkenntnisse im 3D-Druck hatten und die Unterstützung durchs FabLab gross war, hatten wir wenig Probleme unserer Prototypen herzustellen. Das einzige was uns Probleme bereitet hat, war die Masshaltigkeit der gedruckten teile. Da jeder Drucker etwas andere Eigenschaften hat, mussten wir uns zuerst mit den Druckern vertraut machen. Um sicher zu gehen das man die gedruckten Teile ohne Nachbearbeitung verwenden kann, sollte man einen Millimeter vom exakten Mass Zugabe lassen.
LaserCutter

Mit Hilfe des Lasercuters haben wir das Gehäuse unseres Infusionsalligators aus MDF-Platten gelasert. Dies funktionierte sehr gut und ohne weiteren Komplikationen. Mit dem Laser-Cutter AKJ-6090 von Acctek, welcher im FabLab steht, kann man Flächen von 900x600 mm bearbeiten. Der 100 Watt Laser kann diverse Materialien Gravieren und ausschneiden. Die Materialien reichen von Plexiglas über Kunststoffe und Holz bis hin zu Karton, Leder oder Textilstoffe. Es kann Acrylglas bis zu einer Dicke von ca. 8 mm und Holz bis zu einer Dicke von 6 mm geschnitten werden. Aluminium kann graviert werden, jedoch nicht geschnitten.
Bei den SkillShare-Sessions ging es darum, vorhandenes Wissen zu Teilen und vom existierenden Wissen der Mitstudierenden zu profitieren. Man konnte zu Beginn der Woche auf rote Zettel Themen aufschreiben über die man gerne mehr erfahren oder lernen möchten. Zusätzlich konnte man auf Blaue Zettel seine "Skills" aufschreiben, worin man selbst stark ist. Anschliessend wurde eine Auswahl an Themen getroffen welche am meisten aufgeschrieben wurden. Jede Gruppe musste dann im verlauf der Woche eine SkillShare-Session durchführen und jeder Student musste mindestens 2 Sessions besuchen. Somit konnte bestehendes Wissen gut geteilt werden.
Arduino

Das Arduiono ist eine open Source Hardware und Software. Bei der Hardware handelt es sich um ein elektronik Board mit Mikrocontroller und diversen Ein- und Ausgängen. Die Programmiersprache basiert auf Processing und ist ähnlich zu Programmieren wie C oder C++. Für unser Projekt haben wir das Arduino verwendet um zwei Servomotoren anzusteuern und LEDs leuchten zu lassen. Mit Hilfe des Mussel SpickeShield haben wir die Muskelkontraktionen gemessen und im Arduino eingelesen und verwendet um die Motoren anzusteuern.
Das Arduino hat eine USB-Schnittstelle um den Code vom PC auf den Mikrocontroller zu laden. Zusätzlich verfügt das Arduino über eine separaten Stromanschluss um das Board zu speisen. Mit Hilfe des Arduinos könne diverse Analoge und Digitale Signale eingelesen werden. Zusätzlich können diverse Aktoren angesteuert werden, wie zum Beispiel DC-Motoren, Servo-Motoren und sogar Schrittmotoren.
Experimente
Muscle SpikerShield

Das Muscle SpikerShield wurde als Bausatz abgegeben und einmal fertig zusammengebaut. Die Bauanleitung dazu wird auf der Webseite https://backyardbrains.com/products/diyMuscleSpikerShield zur Verfügung gestellt.
Hintergrund
Wenn das Gehirn einen Muskel bewegen will, sendet es ein Signal über die Nervenbahnen zum gewünschten Muskel. Dieses Signal wird in Form eines Aktionspotentials über das Rückenmark zum entsprechenden Motorneuron des Muskels weitergegeben. Wenn das Aktionspotential am Muskel ankommt, verursacht es eine Spannung, da die Muskelzellen ihre Kalziumkanäle öffnen und ein Ionenaustausch verursacht. Das verursacht die Muskelkontraktion. Genau diese Spannung kann über die Elektroden aufgenommen werden, und mit dem Muscle SpikerShield ausgewertet werden.
Experiment
In diesem Experiment wurde das Kit zusammengebaut. Danach konnten die Elektroden auf einem Muskel platziert werden. Eine Referenzelektrode wurde irgendwo sonst auf dem Körper platziert. Mit dem zur Verfügung gestellten Code, konnte zusammen mit einem Arduino Uno das Signal des entsprechenden Muskels ausgewertet werden. Es zeigte sich als aufleuchtende LEDs, anhand der stärke der Kontraktion. Das Signal konnte auch als Diagramm dargestellt werden. Dieses Experiment bildet die Grundlage, um eine Schaltung oder Steuerung zu erstellen, die über Muskeln funktionieren kann.
Heart and Brain SpikerShield
Hintergrund
Mit dem Heart and Brain SpikerShield kann das Aktionspotential des Herzens und langsame Hirn-Rhythmen gemessen werden.
Experiment
Den Heart and Brain SpikerShield haben wir fertig zusammengebaut erhalten, und hatte deshalb nicht den gleichen Reiz wie der Muscle SpikerShield. Auch die dargestellten Signale des Herzens und des Hirns waren nicht so eindeutig wie beim Muscle SpikerShield. Da wir so fasziniert waren, dass man mit dem Muscle SpikerShield etwas Aktiv gesteuert werden kann, wurde der Heart and Brain Shield schnell wieder weggelegt. Uns fehlte die aktive Steuerung, da der Herzrhythmus nur regelmässig und unbewusst abläuft und die Hirnströme waren nur ein chaotisches, für uns unbrauchbares Signal. Allerdings hat uns Gaudi ein interessantes Experiment gezeigt, wo er seinen Herzrhytmuns auf einem 2D-Drucker aufgezeichnet hat. Das war auf jeden Fall sehr spannend.
Servo-Anzeige
In Gedanken schon bei unserem finalen Prototypen, wollten wir unbedingt etwas bauen, dass per Muskelbewegung gesteuert werden kann. Deshalb war der erste Schritt dazu, mit dem Muskel etwas anzusteuern. Die LEDs funktionierten ja schon mit dem Muscle SpikerShield selbst. Deshalb haben wir versucht, einen Servo über einen Muskel anzusteuern. Zuerst haben wir ganz trivial, die Anzahl LEDs in einen Winkel auf dem Servo umgerechnet. Später auch etwas komplizierter, dass eine bestimmte Position angefahren wird, wenn der Muskel bewegt wird.
Arduino-Code: #Servo
Probleme
Viele Gruppen hatten Probleme, einen Servo anzusteuern. Bei uns hat es komischerweise auf Anhieb funktioniert. Aufgrund mangelndem Wissen konnte aber keiner genau sagen, warum es genau bei uns funktionierte. Später hat sich herausgestellt, dass ein Servo mit der Signalleitung auf einen PWM-Pin gesteckt werden muss, den wir zufälligerweise getroffen haben. Auf dem Arduino Uno sind nur bestimmte Pins sogenannte PWM-Pins. Ein weiteres Problem war, dass gewisse Pins vom SpikerShield selbst gebraucht wurden und so der Servo gar nichts oder irgendetwas unerwartetes gemacht hat.
Unser Prototyp
Einführung
Neben den verschiedenen Experimenten, wurde im Rahmen dieser Blockwoche Medizintechnik DIY eine kleine Projektarbeit (Prototype) mit Bezug zur Medizintechnik durchgeführt. Das Ziel dieses Projekt ist die Anwendung von erlangtem Wissen, sowie eine Erweiterungen des Medizin-technischen Horizonts.
Das Ziel unserer Projektarbeit ist, den Infusionsständer zu überarbeiten. Durch den Infusionsständer sind die täglichen Spaziergänge stark eingeschränkt, Spaziergänge über Wiesen oder Schotterwege sind gänzlich ausgeschlossen. Mit dem im Team eigens entwickelten Prototype dem „Infusions-Alligator“ werden unabhängige Spaziergänge auf jeglichem Terrain ermöglicht. Treppen, sowie holprige Unterlagen stellen für den "Infusions-Alligator" keine Probleme dar. Die Unabhängigkeit wird durch einen ergonomisch geformten Rucksack ermöglicht. In diesem Rucksack befindet sich der Mechanismus, welche die Versorgung von Schmerzmitteln oder Kochsalzlösungen sicherstellt. Die Menge des Schmerzmittels ist bequem über die Muskelkraft in der Hand steuerbar.
Realisierung mechanischer Komponenten Infusions-Alligator
Eine mechanische Konstruktion einer Pumpe ermöglicht das Fördern des Schmerzmittels. Ein bestandteil der Pumpe sind die Zahnstangen und Zahnräder. Die Auslegung dieser Komponenten erfolgte mittels der Software Kisssoft. Mit Berücksichtigung der gültigen Normen DIN, ISO und AGMA gewährleistet die Software Kisssoft einfache Auslegungen, Nachrechnungen und Festigkeitsberechnungen von Zahnräder, sowie weiteren Getriebe-Komponenten in verschiedenen Arten von Materialien. Einführungen und Tutorials in die Software Kisssoft finden sie unter folgendem Link:
https://www.kisssoft.ch/deutsch/downloads/instructions_kisssoft.php
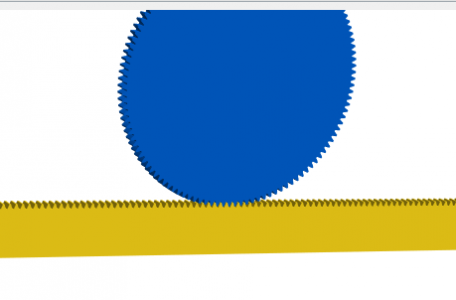
Auslegung Zahnstangen und Zahnräder mittels Kisssoft

Anschließend erfolgte die Implementierung der Getriebekomponenten in die CAD-Software NX von Siemens. Für die optimale Platzierung der beiden Servomotoren erfolgte das konstruieren einer Einheit im CAD. Die verschiedenen Komponenten haben wir mittels einem adaptiven Fertigungsverfahren dem 3D-Drucken hergestellt. Für eine optimale Abschirmung der technischen Komponenten dient ein Gehäuse aus NDF-Platten. Das Gehäuse wurde wiederum in der CAD-Software NX gezeichnet und anschließend mit dem Laser-Cutter aus NDF-Platten ausgeschnitten. Zu berücksichtigen gilt es, dass beim designen von Laser-Cutter Bauteile keine Anpassung der Fertigungstoleranzen in der Zeichnung der Spaltmasse notwendig sind.
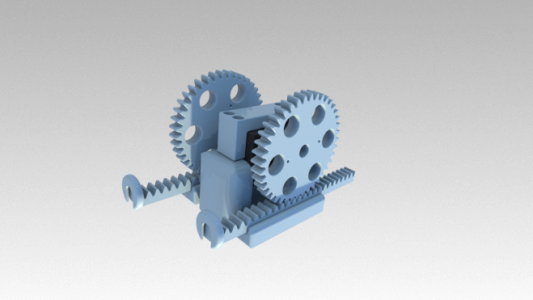
CAD-Modell
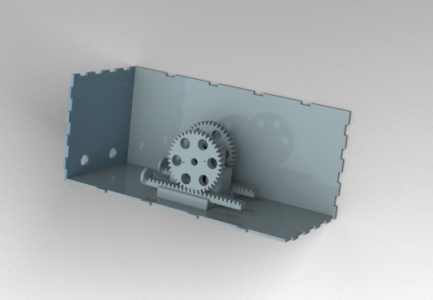
CAD-Modell inklusive Gehäuse
3D-Druck

Gehäuse aus NDF-Platten




Montage der Komponenten
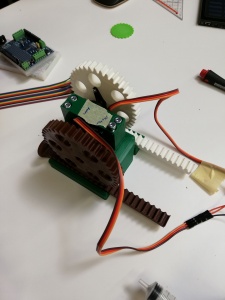
Zur Realisierung der Pumpe wurde das Getriebe direkt mit zwei Spritzen verbunden, dadurch wird das Fördern vom Schmerzmittel sichergestellt. Das Steuern der Servomotoren erfolgt mittels dem Muscle Spiker Shield. Die Stromversorgung wird durch einen Akkumulator ermöglicht. Zur Visualisierung des Schmerzmittelfüllstands wurden zusätzlich sechs LED’s eingebaut. Die ganze Einheit wird mit zwei Arduino Uno‘s gesteuert, der Code ist im Kapitel Anhang ersichtlich. Zudem gewährleistet ein ergonomischer Nierengurt bequemes Tragen des "Infusions-Alligators".
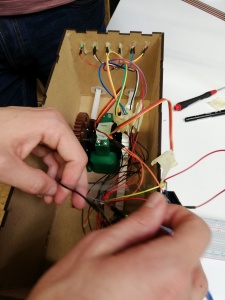
Montage der Komponenten
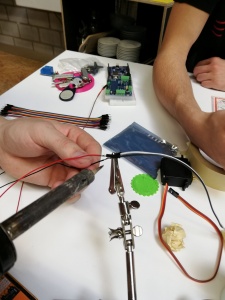
Löten der Stromversorgung

Gehäuse mit Komponenten

Infusions-Alligator




Prototype Infusions-Alligator
Der Infusions-Alligator erhöht die Lebensqualität von Menschen, welche auf eine intravenöse Zufuhr von Schmerzmittel angewiesen sind. Dieser Rucksack ermöglicht Spaziergänge in jeglichem Terrain. Die Schmerzmittel Zufuhr lässt sich bequem durch das Ballen der Faust steuern. Zur Überwachung des Schmerzmittelfüllstand sind am "Infusions-Alligator" sechs in verschieden Farben leuchtenden LED’s angebracht. Das folgende Video gibt einen Einblick wie der "Infusions-Alligator" funktioniert.
Infusions-Alligator
Arbeitsjournal
Tag 1
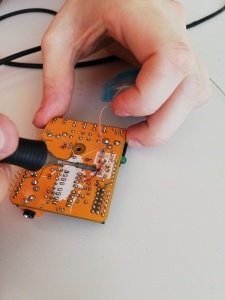
Am Montag Morgen gab es eine Einführung in den Ablauf der Blockwoche. Auch die Räumlichkeiten wurden gezeigt, wo die Projektteams die nächste Woche arbeiten werden. Danach wurden die Gruppen zusammengestellt, indem die Studiengänge auf die verschiedenen Teams verteilt wurden, um möglichst interdisziplinäre Teams, mit unterschiedlichen Fähigkeiten zusammenstellen zu können. Danach erhielt jedes Team ein Set von Werkzeugen und Material zum Experimentieren. Darunter auch einen Arduino Uno und einen Bausatz für einen Muscle SpikerShield. Dieser Bausatz musste zuerst zusammengelötet werden. Dadurch konnte die Gruppe sich erst mal mit dem Lötkolben vertraut machen. Mit dem anschliessenden experimentieren konnte ebenfalls festgestellt werden, ob das Löten gut genug war, um das Shield zum laufen zu bringen. Der entsprechende Code, um die Daten der Elektroden auslesen zu können, wurde auf der Webseite von Backyard Brains zur Verfügung gestellt. Auch eine Anleitung, wie die Elektroden verwendet werden sollen, wurde mitgegeben.
Tag 2
Am Dienstag konnten wir weitere Experimente machen und ausprobieren um uns mit dem Arduino und dem Muscle Spikershield vertraut zu machen. Zusätzlich war ein Ziel dieser Woche diverse Skills von anderen Studierenden zu erlernen und auch den anderen ein Skill beizubringen. Am Morgen haben wir zusammengetragen welche Personen welche Skills haben und welche Skills erlernt werden möchten. Anschliessend wurden die einzelnen Themen definiert und den einzelnen Gruppen zugeteilt. Jede Person mussten an zwei Veranstaltungen teilnehmen und musste eine Veranstaltung leiten. Am Nachmittag hatten wir eine Einführung ins FabLab. Die Hälfte konnte sich am 3D-Drucken versuchen und die andere Hälfte hatte eine Einführung ins Laserschneiden. Zum Schluss wurde der Tag mit einer Musikalischen Unterhaltung und gemütlichem Beisammensein abgerundet. Es gab einen kleinen Apero und man konnte gegenseitig sein erlerntes Wissen austauschen.
Tag 3
Der Tag hat mit einer weiteren Skillshare Session begonnen. Danach konnten sich die Studierenden wieder dem Experimentieren mit dem Muscle SpikerShield und dem Heart and Brain SpikerShield zuwenden. Unsere Gruppe hat versucht, den Programmcode des Muscle SpikerShields zu modifizieren, um mit der Muskelaktivität etwas zu steuern, wie zum Beispiel einen Servomotor. Diesen haben wir dazu gebracht, dass er die Muskelaktivität anzeigt. Effi Tanner hat uns heute einen Einblick in ihre Tätigkeiten und ihre Laufbahn gegeben. Sie hat uns erzählt, an welchen Projekten sie sich beteiligt hat und woher sie ihre Inspiration nimmt. Teil des Kurses war auch, dass am Ende ein kleiner Prototyp im Zusammenhang mit Medizintechnik gebaut wird. Dazu konnten sich die Studierenden von einem Sammelsurium von Medizintechnikprodukten inspirieren lassen. Uns sind dabei die Spritzen aufgefallen, und wir haben uns überlegt, was wir damit machen könnten und haben mit der Planung begonnen.
Tag 4
Auch heute gab es wieder verschiedene SkillShare Sessions, wo die Studierenden von anderen Studierenden etwas neues lernen konnten. Allgemein wurde der Austausch von Wissen in dieser Blockwoche stark gefördert. So wurde zum Beispiel regelmässig ein Rundgang durch die Teams eingeplant. Dabei konnten die Teams berichten, woran sie Arbeiten, und berichten was sie gelernt haben, oder was schief gegangen ist. Der Austausch von Problemen war ein sehr wichtiger Teil. So konnte man erkennen, ob eine andere Gruppe das gleiche Problem hat, oder eventuell sogar schon eine Lösung dazu bereit hält. Das erspart enorm viel Zeit. Am Nachmittag wurde uns die Möglichkeit gegeben, mit Greg Gage via Skype zu kommunizieren. Greg Gage ist Entwickler von Backyard Brains und wir konnten ihm einige spannende Fragen stellen. Ebenfalls am Nachmittag wurden die ersten Prototypen der Gruppen vorgestellt und uns wurde nahegelegt, dass es manchmal besser sei, wenn man einen ersten Prototypen abschliesst, und sich noch an etwas Neues wagt. Allerdings haben sich die meisten Gruppen dazu entschlossen, noch weiter an ihrem ersten Prototypen weiterzutüfteln. Auch unsere Gruppe arbeitete am bisherigen Prototypen weiter, da unserer noch nicht sehr weit entwickelt war. Wir haben also die Zeit genutzt, um Teile am 3D-Drucker oder im LaserCutter herzustellen für unseren Prototypen. Auch die Elektrotechnikwerkstatt wurde als geheimer Treffpunkt der Gruppen verwendet, da dort noch mehr Werkzeuge und Maschinen vorhanden sind.
Tag 5
Gegen Ende der Woche wurde die Freiheit im Arbeiten immer grösser. Es gab immer weniger SkillShares und immer weniger Unterbrechungen zum Austausch unter den Gruppen. Deshalb konnten wir ungestört unseren Prototypen soweit fertigstellen, dass er an der grossen Präsentation am Samstag funktionsfähig vorgeführt werden konnte. Deshalb konnten wir heute alle Komponenten vereinen, die wir 3D-Gedruckt, am Lasercutter zugeschnitten oder zusammengelötet hatten. Auch am Programmcode wurde noch so lange gefeilt, dass alles funktionierte. Zum Schluss räumten die Gruppen ihre Arbeitsplätze auf und im oberen Stockwerk wurde Platz für die morgigen Präsentationen geschaffen.
Tag 6
Am Samstag morgen konnten wir erst mal "ausschlafen", da der Unterricht erst um 9 Uhr begonnen hat. Dann fanden die Präsentationen der Gruppen und deren Prototypen statt. Es war sehr spannend zu sehen, wie viele unterschiedliche Produkte und Herangehensweisen zusammen kamen. Die offene Aufgabenstellung trug dazu bei, dass sich jede Gruppe selber verwirklichen konnte und ihrer Kreativität freien Lauf lassen konnte. Auch wir stellten unseren Prototypen, die Automatische, Tragbare Infusionspumpe vor. Leider war der Prototyp noch nicht ganz ausgereift und funktionierte dadurch nur teilweise gut. Die Präsentation war aber auf jeden Fall ein Erfolg und sorgte für den einen oder anderen Lacher. Zum Abschluss wurde dann eine Reflektionsrunde durchgeführt, wo die Studierenden mitteilen konnten, was gut und was schlecht war. Auch Verbesserungsvorschläge wurden von den Kursleitern gerne entgegengenommen, um die Woche im nächsten Jahr noch besser durchführen zu können.
Vorbereitung
Readings
FabLab
http://fablab-luzern.ch/info/fab-charta-2/#FabCharter
Biotechnologie für Alle
Biotechnologie findet nicht mehr nur in speziell ausgerüsteten Labors statt. Bastler aus allen Fachbereichen bringen die Labortechnologie in Küchen, Bäder, Keller oder sonstige Labors der "Marke Eigenbau". 2008 begann in Boston die Verschiebung von Biotechnologischer Forschung von etablierten Institutionen in die Küchen und Garagen von Bastlern und Technik-Freaks. Seither gibt es einen deutlichen Trend rund um den Globus, wo sich Menschen ihre eigenen Laborgeräte bauen und ihre Entwicklungen mit der Welt teilen.
https://www.hackteria.org/wiki/images/a/ac/SATW_INFO_2-15_DIY-Bio_DE.pdf
Interview in "The Art of Free and Open Science", MCD#68
Im Interview erzählt Kursleiter Marc Dusseiller über die Entwicklung von Hackteria. Hackteria soll professionelle Laborpraktiken und DIYbio zusammenbringen. Im Gegensatz zu einem komplett eingerichteten Labor tüftelten sie an einem mobilen Labor, das überallhin transportiert und aufgestellt werden kann.
https://www.hackteria.org/wordpress/wp-content/uploads/2012/10/hackteria_interview_MCD68.pdf
Videos
How to control someone else's arm with your brain | Greg Gage
Das Video handelt von Greg Gage, der in einem Ted Talk über das Gehirn berichtet. Das Gehirn fasziniert ihn und er findet es Schade, dass der Aufbau und die Funktion zu wenig Bekanntheit hat. Deshalb will er Neurowissenschaften günstig und anschaulich zeigen. Im Video demonstriert er eine SpikerBox, die elektrische Impulse des Nervensystems aufzeichnen kann. Zwei Personen erhalten zwei Elektroden am Arm und eine auf der Hand. Wenn nun die erste Person ihren Arm anspannt, erkennt dies das Gerät, und sendet einen elektrischen Impuls an die zweite Person. Das führt zur unwillkürlichen Kontraktion des Muskels der zweiten Person.
P2P and Utopia | Based on Poem by Vasilis Kostakis 2008
"Simplicity: We know it when we see it" | George Whitesides
George Whitesides versucht im Video zu erklären was Einfachheit der Dinge heisst. Im ersten Moment klingt das banal, doch wenn man sich das genauer überlegt, ist die Frage alles andere als "einfach" beantwortet.
"Why toys make good medical devices | Jose Gomez-Marquez
Jose Gomez-Marquez lässt sich von Kinderspielzeug inspirieren, um neue medizintechnische Geräte zu entwickeln. Er findet vor allem die Supply-Chain von Spielzeug interessant. Das heisst es ist überall auf der Welt anzutreffen. Er schaut sich besonders an, wie Teile zusammengefügt sind oder welche Bauteile er entnehmen kann. Spielzeug wurde aufwändig Entwickelt, was er ausnutzen will, um die Inventionen zu "hacken"
SENI GOTONG ROYONG: HackteriaLab 2014 - Yogyakarta
HackteriaLab 2014 - Yogyakarta ist ein zweiwöchiges Treffen von Forschern, Künstlern, Wissenschaftlern, ... in der Universitätsstadt Yogyakarta. Als Web-Community ist das Ziel von Hackteria, Hacker zu ermutigen, zu "basteln", tüfteln, zusammenzuarbeiten und ihr Wissen zu Teilen.
Open Source Estrogen: Housewives Making Drugs - Mary Maggic
Ziel dieses Projektes ist es, ein Open Source Protokoll für die Östrogensynthese zu entwickeln. Als Reaktion auf die verschiedenen Biopolitiken der hormonellen Steuerung von weiblichen Körpern, die von Regierungen und Institutionen vorgeschrieben werden, zielt das Projekt darauf ab, DIY-Protokolle zur Emanzipation des Östrogen-Biomoleküls zu entwickeln.
Zum Hauptartikel: DIY-MedTech Löten - Team Alligators
Ziel des Kurses
Die Grundlagen des Lötens kennen und verstehen. In der Lage sein einfache Print-Platte zu Löten, sowie die Lötstelle auf Korrektheit zu beurteilen. Ein weitere Meilenstein ist das Erlangen der Grundkenntnisse des Entlöten einer fehlerhaften Lötstelle.
Grundlagen und Definition von Löten
Löten ist ein stoffschlüssiges Fügen und Beschichten von Werkstoffen mithilfe eines geschmolzenen Zusatzmetalls, dem Lot. Die Grundwerkstoffe werden vom Lot benetzt, ohne geschmolzen zu werden. Durch das Löten enstehen unlösbare, stoffschlüssige Verbindungen, die fest, dicht und leitfähig sind, wobei bei diesem Kurs die leitfähigkeit im Vordergrund stehen. Beim Löten werden grundsätzlich drei verschieden Lötverfahren unterschieden, das Weichlöten, das Hartlöten und das Hochtemperaturlöten siehe Kapitel Lötverfahren.
Lötverfahren
Beim Weichlöten liegt die Arbeitstemperatur die Arbeitstemperatur unter 450°C. Das Weichlöten wendet man an, wenn dichte oder leitfähige Verbindungen erforderlich sind und an die Belastbarkeit keine hohen Ansprüche gestellt werden oder wenn die zu lötenden Bauteile wärmeempfindlich sind. Das Löten von elektronischen Bauteilen, was der Inhalt zu diesem Kurs bildet, gehört zu den gängigsten Verfahren des Weichlötens. Die Funktionsweise und Anwendungen sind im Kapitel Löten elektronischer Bauteile beschrieben.
Beim Hartlöten liegt die Arbeitstemperatur über 450°C. Hartlötverbindungen weisen gegenüber Weichlötverbindung grössere Festigkeit auf als Weichlöten, aber geringere als Weichlötverbindungen auf. Hartlötverbindungen sind ebenfalls bei entsprechenden Einsatz vom Lot leitfähig für Wärme und Strom. Häufig verwendete Werkstoffe für Hartlöten sind Stahl, Kupfer und Messing.

Hochtemperaturlöten ist ein Löten unter Schutzgas oder im Vakum mit Loten, deren Arbeitstemperaturen über 900°C liegt.
Löten elektronischer Bauteile

Das gängigste Verfahren ist das Löten mittels von Lötstationen. Die Lötstationen erlauben einen universellen Einsatz des Lötwerkzeugs, da hier die Lötspitzentemperatur in weiten Grenzen sehr genau und stabil einstellbar ist. Der Arbeitstemperaturbereich liegt zwischen 180-350°C. Beim im Kurs verwendeten Lötzinn vom Typ Sn99Cu1+ML liegt die ideale Löttemperatur bei ca. 300 °C. Grundsätzlich gilt es dabei zu beachten, dass die Löttemperatur über der Schmelztemperatur des Lots liegt, jedoch sollten zu hohe Löttemperaturen verminden werden, da dadurch ein starkes Überhitzen der elektronischen Bauteile resultieren kann.
Schrittweise Anleitung für erfolgreiches Löten
1. Um zwei Metalle zu verlöten werden sie an der Lötstelle auf die richtige Arbeitstemperatur gebracht. Dazu wird das Lötgerät verwendet. Hat die Lötspitze des Lötgerätes die richtige Temperatur, dann dauert das ca. 2 bis 3 Sekunden.
2. Danach wird das Lötzinn kurz hinzugeführt (ca. 1 bis 3 Sekunden). Das Lötzinn beginnt im Optimalfall zwischen die Metalle zu fließen. Dabei steigt ein kleiner Rauchfaden auf und es knistert etwas an der Lötstelle. Je nach Größe der Lötstelle dauert das zwischen 2 bis 5 Sekunden. Sauber fließendes Lötzinn glänzt silbrig. Hat sich das Zinn verteilt, wird das Lötgerät entfernt.
3. Danach kühlt die Lötstelle ab. Haben die Metalle eine mechanische Verbindung und werden keiner Erschütterung (Verwackeln, Zittern) ausgesetzt glänzt die Lötstelle silbrig. Falls die Lötstelle nicht den Anforderungen entspricht kann diese mit entlöten entfernt werden.
4. Überflüssiges Lötzinn an der Lötspitze sollte umgehend mittels eines nassen Schwammes entfernt werden
Entlöten von Lötstellen
Falls ein Bauteil fälschlicherweise nicht korrekt platziert ist oder die Lötstelle ungenügend ist, gibt es die Möglichkeit die Lötstelle zu entlöten. Meistens reicht ein erneutes erhitzen der Lötstelle aus, sodass die Bauteile durch herausziehen entfernt werden können. Ist dies nicht der Fall lassen sich Lötstellen nur mit viel Mühe und Aufwand wieder entfernen. Grundsätzlich gibt es zwei verschiedene Verfahren zum Entlöten, mittels einer Lötlitze oder einer Lötpumpe.
Entötlitze Die Entlötlitze ist ein feines Drahtgeflecht aus Kupfer, das in erhitztem Zustand Lötzinn aufsaugt. Dazu muss sich die Entlötlitze zwischen Lötstelle und Lötspitze befinden. Das Entlöten mit der Entlötlitze entfernt das Lötzinn nahezu rückstandfrei.
Entlötpumpe Das zweite Hilfsmittel ist die Entlötpumpe. Sie wird durch Druck gespannt, auf die erhitzte und flüssige Lötstelle aufgesetzt und ausgelöst. Sie erzeugt einen kurzzeitigen Staubsaugereffekt, bei dem sie das heiße und flüssige Lötzinn nach oben in sich hineinzieht. Die Lötstelle ist dann mit einem leichten Zinn-Rückstand frei gelegt. Die Kontaktstellen lassen sich im Regelfall voneinander lösen. Doch Vorsicht, beim Betätigen der Entlötpumpe entsteht ein Rückstoß, der die Leiterplatte beschädigen kann. Deshalb ist mit der Entlötpumpe vorsichtig umzugehen.
Entlöten mittels Entlötlitze

Entlötpumpe


Soldering is easy
https://mightyohm.com/files/soldercomic/FullSolderComic_EN.pdf
Learnings
Arduino
In der Blockwoche haben wir den Umgang mit Arduino gelernt. Wir haben gesehen, wie ein Programm aufgebaut ist und wir haben mit verschiedenen elektronischen Bauteilen experimentiert. Auch mit komplizierteren Komponenten wie einem LED-Ring konnte "gespielt" werden.
Rapid Prototyping
Für die Herstellung des Prototyps konnten wir verschiedene Herstellungsmethoden anwenden, die schnell und einfach handzuhaben sind. Mit dem 3D-Drucker lassen sich komplizierte Formen schnell und einfach aus einer CAD-Zeichnung herstellen. Der Laser Cutter kann komplizierte Formen zweidimensional "ausschneiden". So kann zB Holz oder Plexiglas schnell in die richtige Form gebracht werden. Durch geschickte Lock-Mechanismen lassen sich die zweidimensionalen Formen in dreidimensionale zusammenfügen. Mit Polymorph können freie Formen durch "kneten" erreicht werden, die nicht so einfach aufgezeichnet werden können. Und mit Woodcast, wobei durch wärme ein Holzwerkstoff in die gewünschte Form gebogen werden kann.
Informationsaustausch
Mit verschiedenen Methoden lässt sich Wissen schnell verbreiten. So werden nicht zwei mal die gleichen Fehler gemacht und es kann Entwicklungszeit gespart werden. In einem Wiki können Probleme und Learnings festgehalten werden und in einer SkillShare Session kann Wissen weitergegeben werden.
Medizintechnik und Anatomie
Mit der Praktischen Anwendung von Medizintechnik konnte das Wissen über den Körper und die Technik dazu vertieft werden. Die SpikerShields regten zum Nachdenken oder Nachforschen über die genaue Funktion an. Weiter wurden SkillShares von Studierenden der Medizintechnik angeboten wie zum Beispiel die Bildgebenden Verfahren. DIY-MedTech Bildgebende Verfahren
Reflexion
Die Blockwoche wurde von uns als positive Abwechslung zum gewohnten Schulalltag empfunden. Einmal nicht nach konkreter Aufgabenstellung zu arbeiten, sondern uns selbst inspirieren zu lassen, und in der Gruppe einzubringen hat uns sehr gefallen. Das gegenseitige Lernen von anderen Studierenden, die alle bereits Fähigkeiten mitbringen ist ein sehr effizienter und vor allem interessanter Lernansatz. Die SkillShares waren sehr lehrreich und alle motiviert, etwas beibringen zu können. Ein besonderes Highlight war der SkillShare Fisch ausnehmen von Team Gustav. (DIY-MedTech Fisch ausnehmen - Team Gustav) Auch wenn es auf den ersten Blick nicht in die Blockwoche passt, ist es ein wunderbares Beispiel für die Do It Yourself Kultur. Auch der Austausch unter den Gruppen war ein Erfolg. Stand man irgendwo an, oder wusste nicht weiter, konnte man sich Rat bei den anderen Gruppen holen. Bei den Präsentationen gab es einige Spannende Prototypen und Ansätze für DIY. Jeder versteht den Auftrag etwas anders. Das nicht Vorhandensein einer genauen Aufgabenstellung ermöglicht auch ein viel grösseres Projekt zu realisieren als wenn alles vorgegeben ist. Der grosse Vorteil an der Freiheit und der knappen Zeit ist, dass einfach mal drauflos gearbeitet werden kann ohne vorher alles testen. So kann auch mal etwas schief gehen aber man hat trotzdem noch etwas neues dazu gelernt.
Anhang
Servo
#include <Servo.h>
#define NUM_LED 6 //sets the maximum numbers of LEDs
#define MAX 150 //maximum posible reading. TWEAK THIS VALUE!!
int reading[10];
int finalReading;
byte litLeds = 0;
byte multiplier = 1;
byte leds[] = {8, 9, 10, 11, 12, 13};
Servo servo;
int pos = 0;
void setup(){
pinMode(4, OUTPUT);
servo.attach(4, 0, 2500);
servo.write(pos);
Serial.begin(9600); //begin serial communications
for(int i = 0; i < NUM_LED; i++){ //initialize LEDs as outputs
pinMode(leds[i], OUTPUT);
}
}
void loop(){
for(int i = 0; i < 10; i++){ //take ten readings in ~0.02 seconds
reading[i] = analogRead(A0) * multiplier;
delay(2);
}
for(int i = 0; i < 10; i++){ //average the ten readings
finalReading += reading[i];
}
finalReading /= 10;
for(int j = 0; j < NUM_LED; j++){ //write all LEDs low
digitalWrite(leds[j], LOW);
}
Serial.print(finalReading);
Serial.print("\t");
finalReading = constrain(finalReading, 0, MAX);
litLeds = map(finalReading, 0, MAX, 0, NUM_LED);
Serial.println(litLeds);
for(int k = 0; k < litLeds; k++){
digitalWrite(leds[k], HIGH);
for(int l = 0; l < litLeds; l++){
servo.write(10*l);
}
}
//for serial debugging, uncomment the next two lines.
//Serial.println(finalReading);
//delay(100);
}
Prototyp
#include <Servo.h>
#include <Adafruit_NeoPixel.h>
#define PIN 3
#define NUM_LED 6 //sets the maximum numbers of LEDs
#define MAX 150 //maximum posible reading. TWEAK THIS VALUE!!
Adafruit_NeoPixel strip = Adafruit_NeoPixel(16, PIN, NEO_GRB);
int reading[10];
int finalReading;
byte litLeds = 0;
byte multiplier = 1;
byte leds[] = {8, 9, 10, 11, 12, 13};
int valservo = 0;
int valmotor = 180;
int zustand = 0;
Servo servo;
Servo motor;
void setup() {
pinMode(4, OUTPUT);
pinMode(2, OUTPUT);
servo.attach(4);
motor.attach(2);
servo.write(valservo);
motor.write(valmotor);
digitalWrite(leds[0], HIGH);
digitalWrite(leds[1], HIGH);
Serial.begin(9600); //begin serial communications
for (int i = 0; i < NUM_LED; i++) { //initialize LEDs as outputs
pinMode(leds[i], OUTPUT);
}
}
void loop() {
while (1) {
for (int i = 0; i < 10; i++) { //take ten readings in ~0.02 seconds
reading[i] = analogRead(A0) * multiplier;
delay(2);
}
for (int i = 0; i < 10; i++) { //average the ten readings
finalReading += reading[i];
}
finalReading /= 10;
/*for (int j = 0; j < NUM_LED; j++) { //write all LEDs low
digitalWrite(leds[j], LOW);
}*/
Serial.print(finalReading);
Serial.print("\t");
finalReading = constrain(finalReading, 0, MAX);
litLeds = map(finalReading, 0, MAX, 0, NUM_LED);
Serial.println(litLeds);
/*for (int k = 0; k < litLeds; k++) {
digitalWrite(leds[k], HIGH);
}*/
if (finalReading > 50 && zustand == 0) {
if (valservo < 80) {
valservo += 20;
switch (valservo) {
case 40:
digitalWrite(leds[0], LOW);
digitalWrite(leds[1], HIGH);
digitalWrite(leds[2], HIGH);
break;
case 80:
digitalWrite(leds[1], LOW);
digitalWrite(leds[2], HIGH);
digitalWrite(leds[3], HIGH);
break;
default:
break;
}
servo.write(valservo);
}
else
{
servo.write(80);
if (valmotor > 100) {
valmotor -= 20;
switch (valmotor) {
case 140:
digitalWrite(leds[2], LOW);
digitalWrite(leds[3], HIGH);
digitalWrite(leds[4], HIGH);
break;
case 100:
digitalWrite(leds[3], LOW);
digitalWrite(leds[4], HIGH);
digitalWrite(leds[5], HIGH);
break;
default:
break;
}
motor.write(valmotor);
}
else {
valmotor = 100;
valservo = 80;
motor.write(valmotor);
}
}
zustand = 1;
}
if (finalReading < 20) {
zustand = 0;
}
//for serial debugging, uncomment the next two lines.
//Serial.println(finalReading);
//delay(100);
}
}